



















































































全面提升防灾减灾能力:构建协同高效的“大应急”
在自然灾害与突发事件频发的当下,如何有效提升防灾、抗灾、救灾能力,成为全球共同面临的挑战。为应对这一挑战,一套以科技为引领,防、抗、救相结合的综合性解决方案,旨在助力政府及企事业单位构建协同高效的“大应急”管理体系,全面提升对自然灾害和突发···
2024-09-23

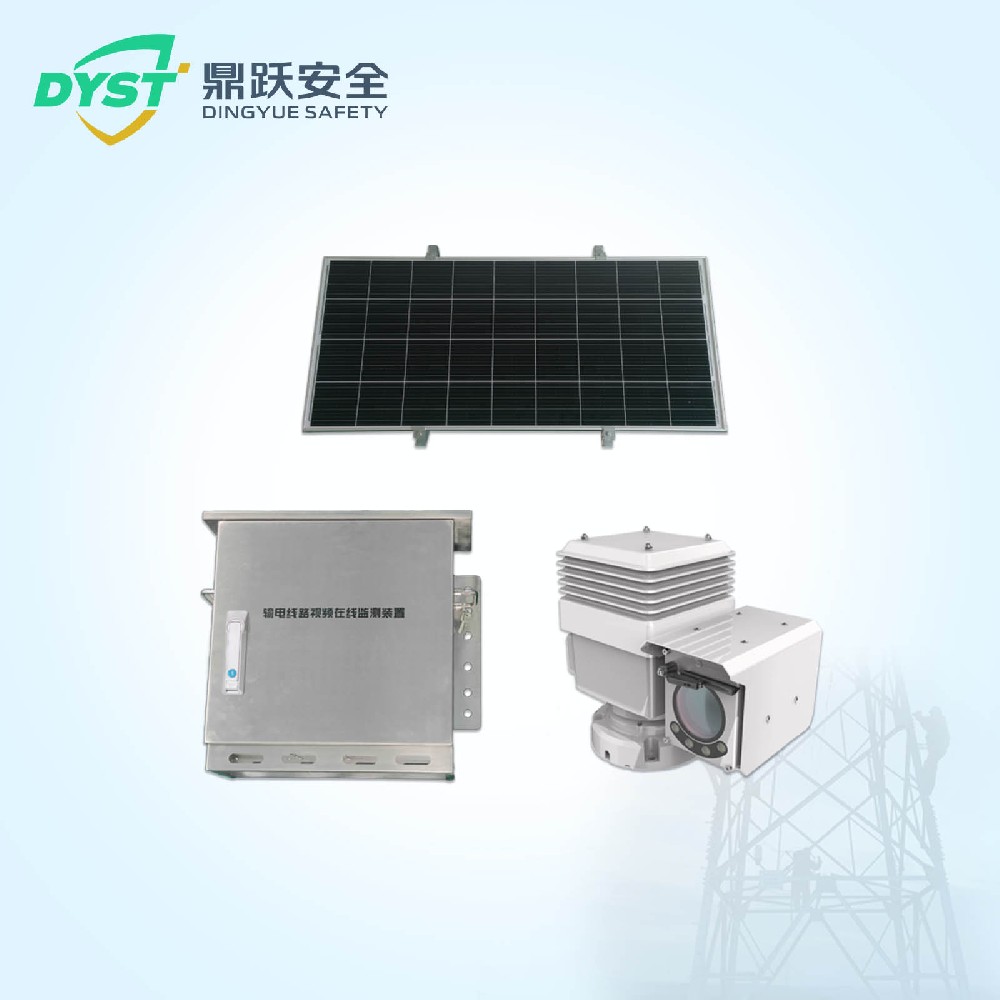
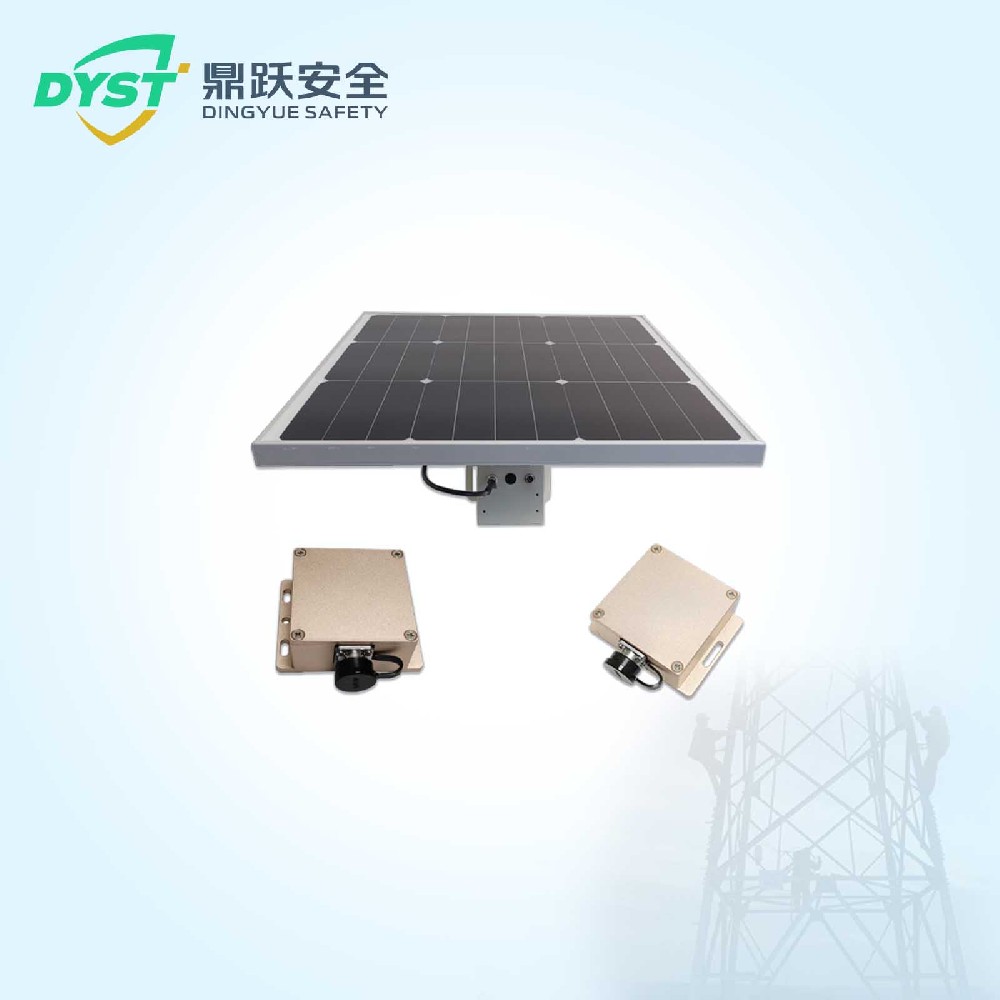
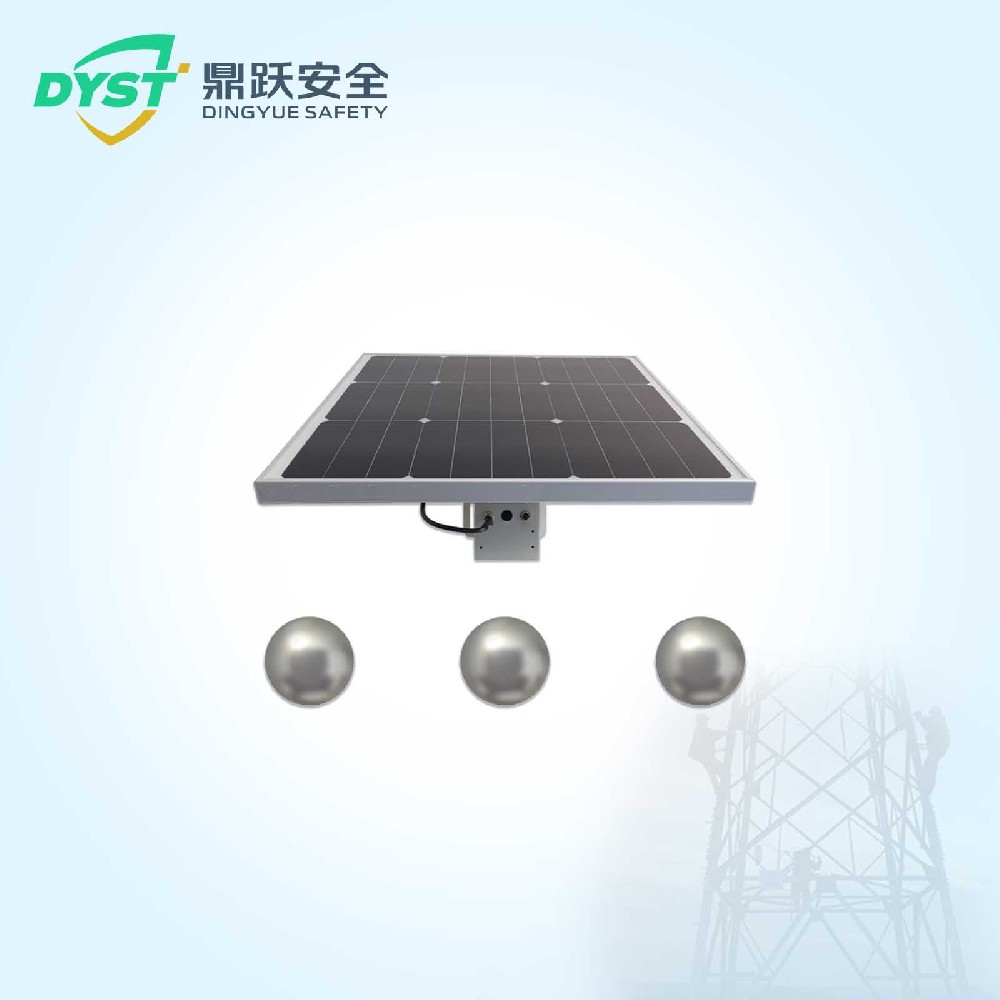
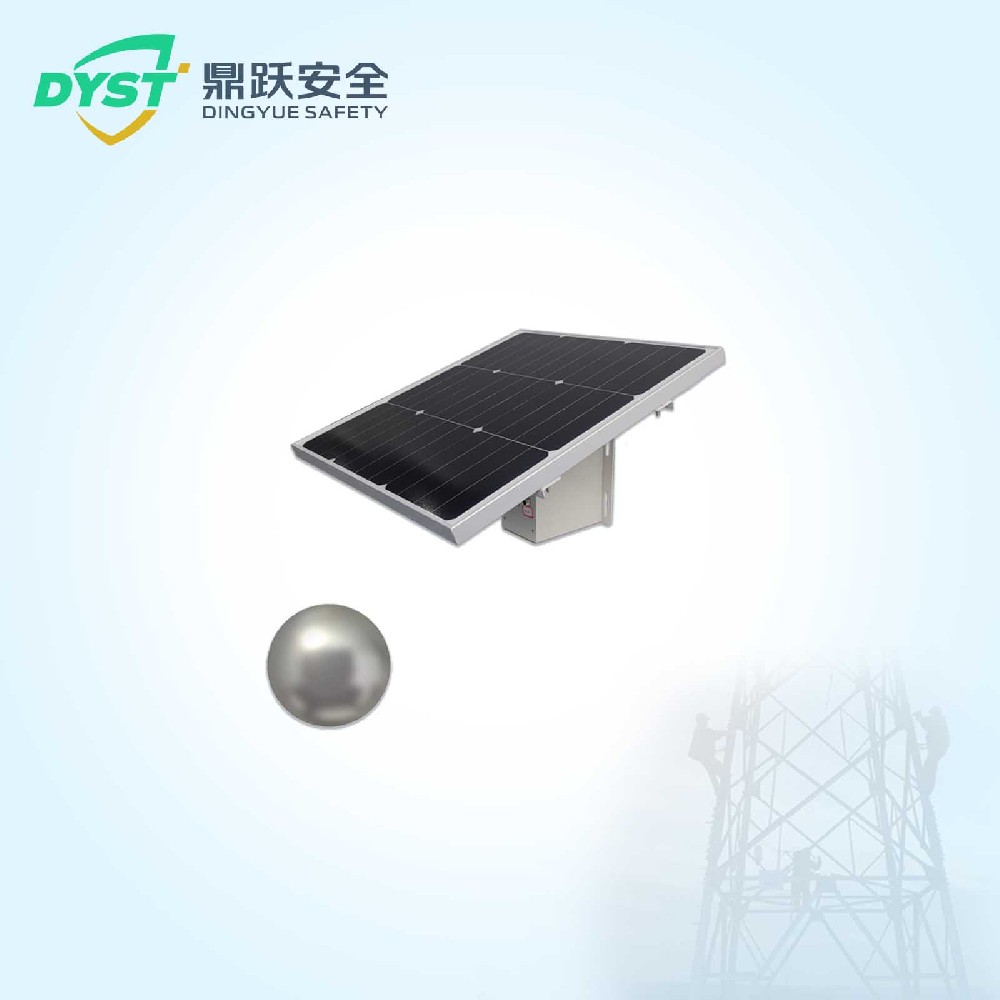
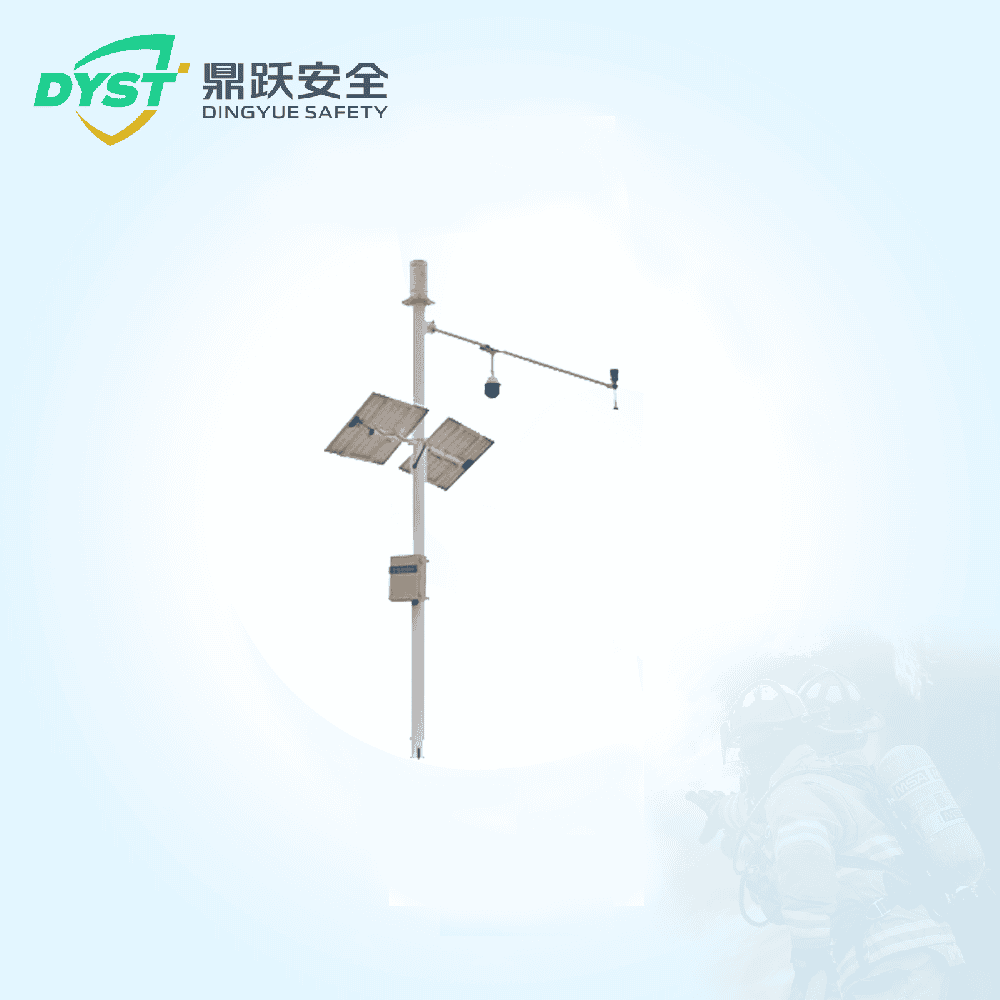
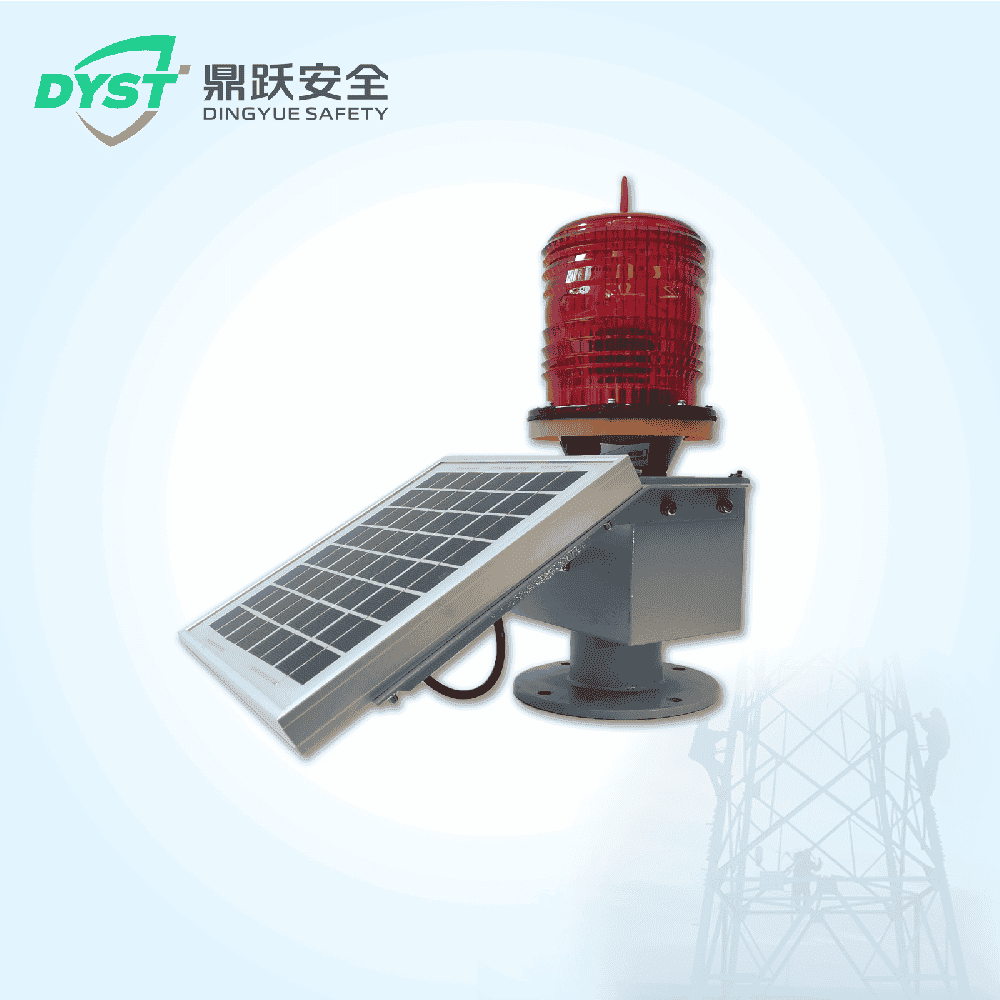
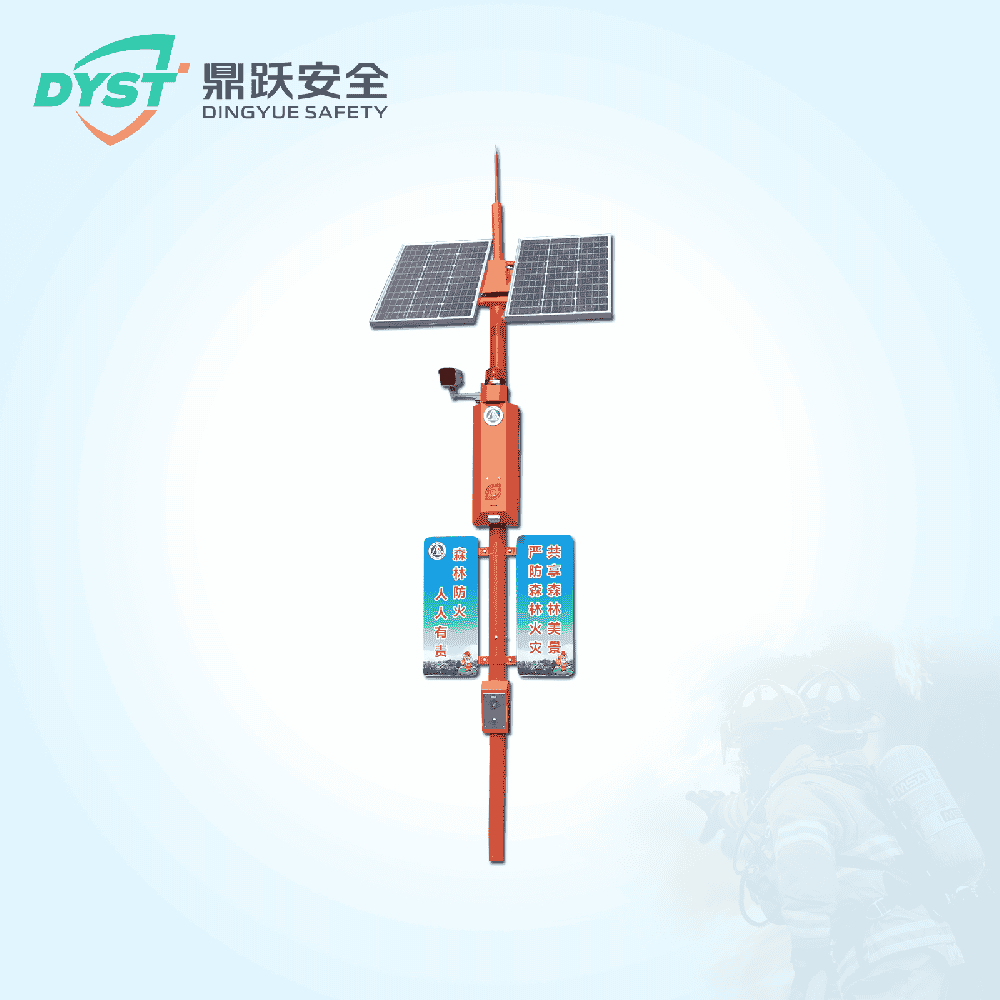
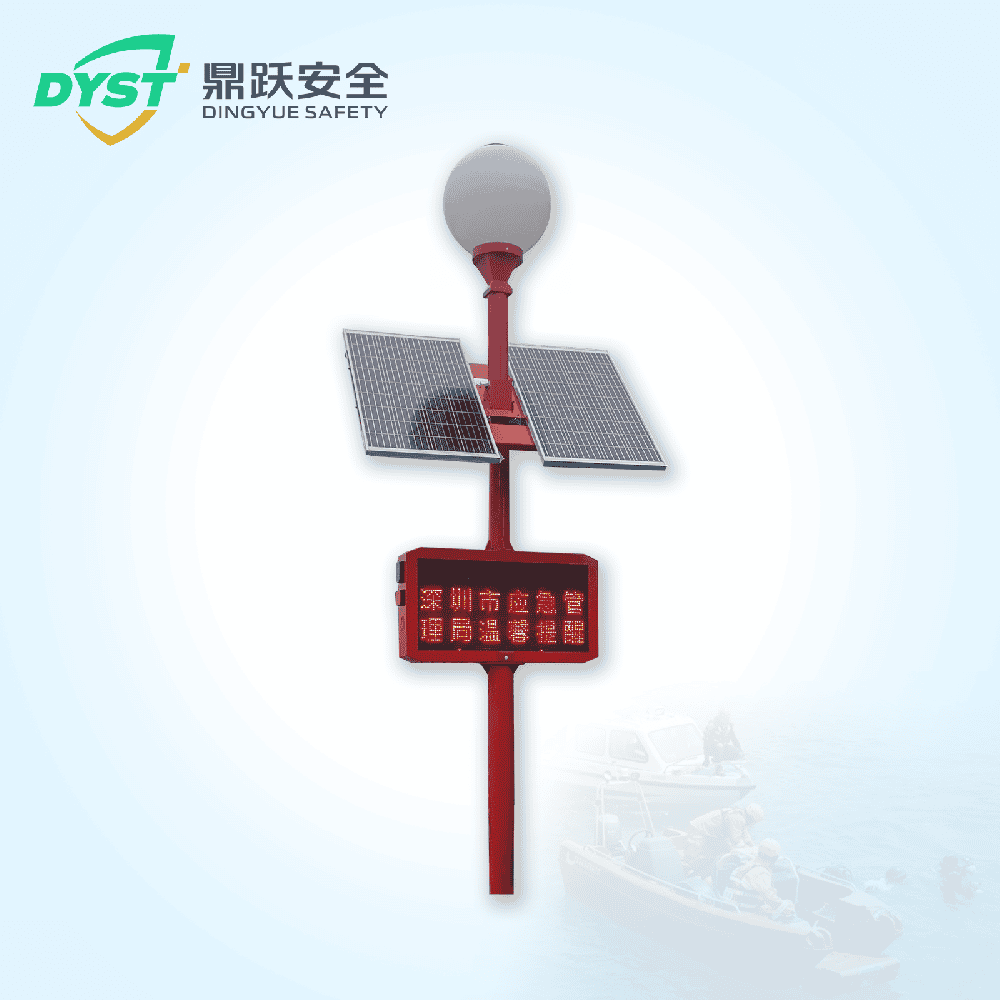
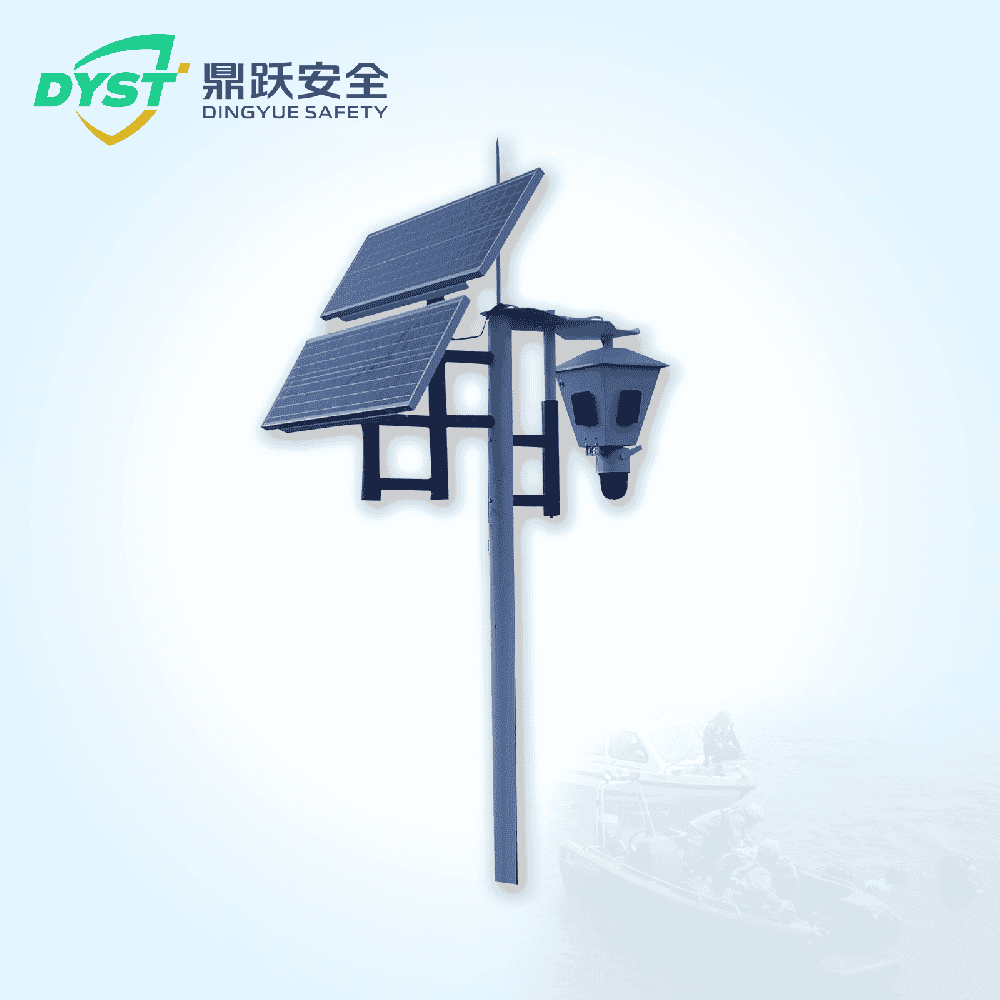
智慧监测语音监控杆解决方案
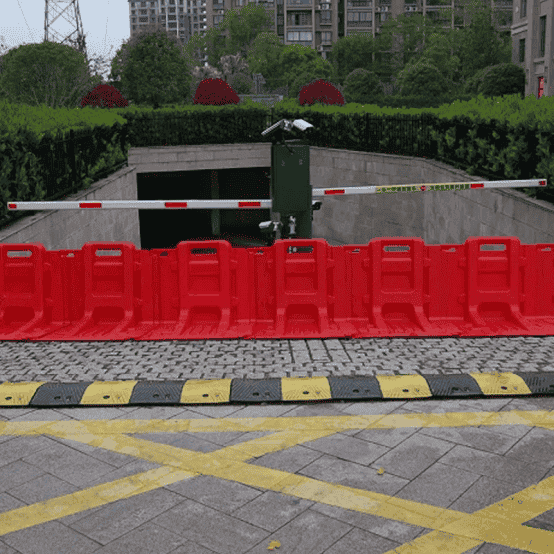
随着各行业对安全和智能化管理需求的增长,传统监控手段难以满足实时、高效的监控需求。为应对这一挑战,我们提出了一种简化的智慧监测语音监控杆方案,通过整合太阳能供电、语音警示、高清视频监控等功能,实现对重点区域的智能化监控和管理。
2024-09-06

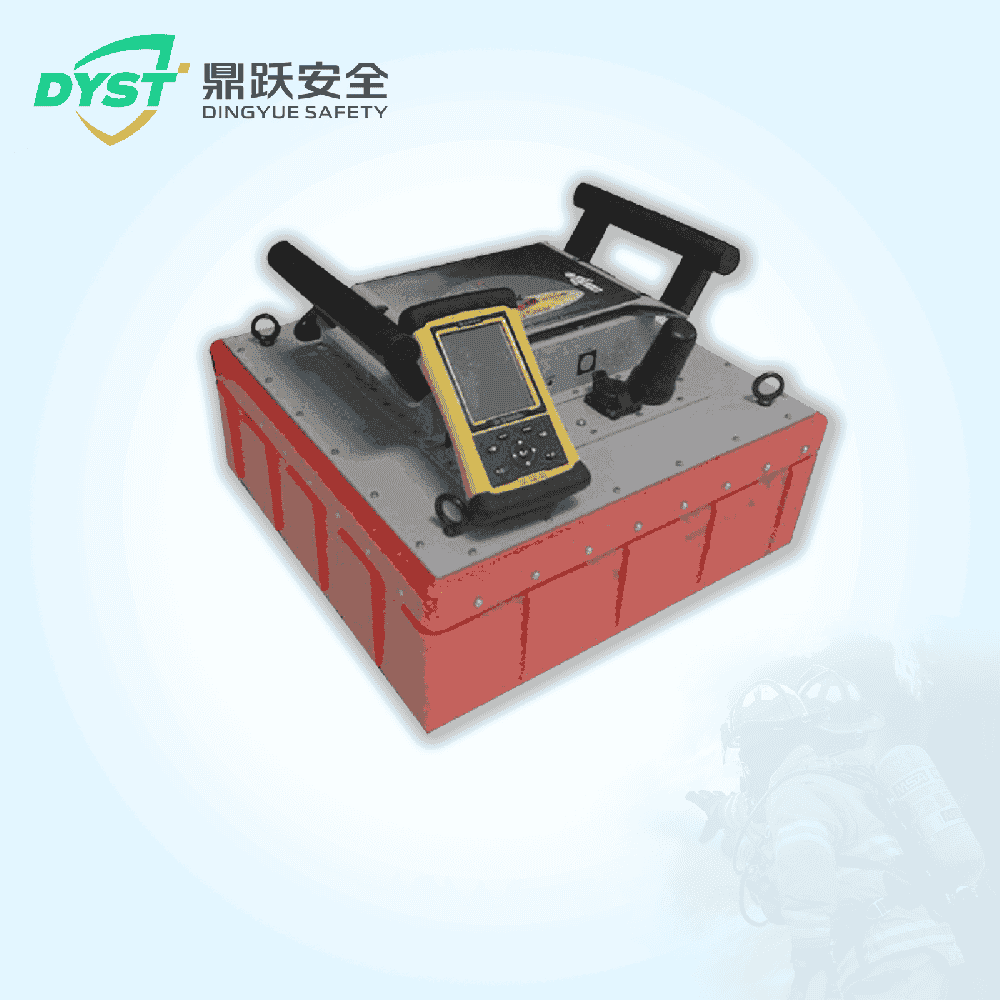
智慧应急平台是干什么的
生活中时不时会发生突发情况,而智慧应急平台的出现将极大地提高我们在危急时刻的自救和互救能力。鼎跃安全推出一款全新的智慧应急平台,旨在为公共机构、企业和个人提供高效、智能化的应急管理工具,确保生命安全和财产保障。首先,智慧应急平台实现了全方位···
2024-05-06

智慧应急平台由什么组成
智慧应急平台能处理应急事件发生的复杂情况,实现资源的合理调配,增加事件处理响应速度。同时智慧应急平台在森林防火、台风预警、水域监测、城市执法等领域有着广泛的应用, 但是你知道它是有什么部分组成的吗?智慧应急管理平台是由数据采集和环境检测系统···
2024-05-05
智慧应急方案
随着时代的快速发展,所需处理的碎片化信息急剧增多,当应急事件发生时,这种情况对应急管理工作带来了更大的挑战。碎片化的信息意味着信息来源广泛、种类繁多、数量庞大,这增加了信息筛选、整合和分析的难度。在应急事件中,快速、准确地获取和处理信息对于···
2024-04-24
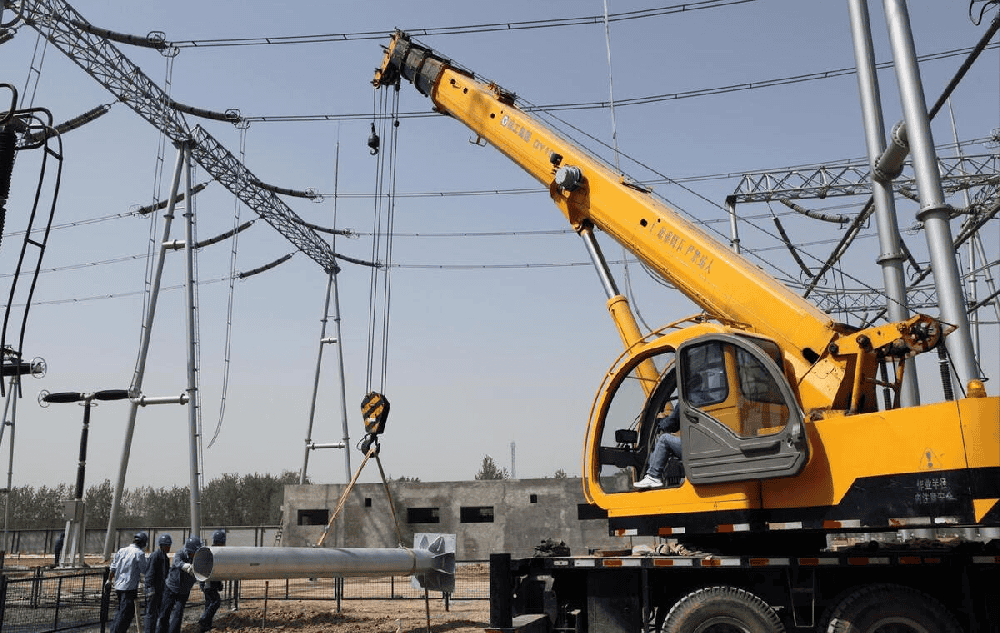
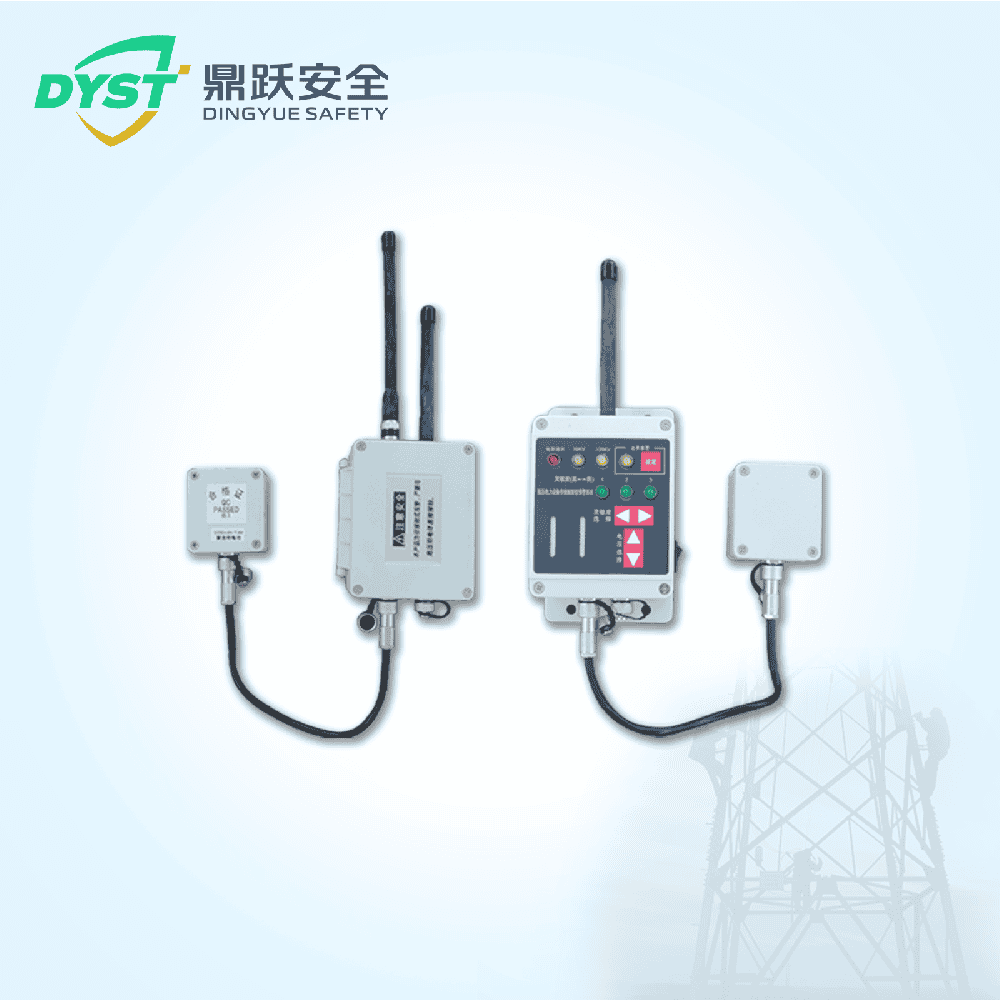
吊车近电预警装置在电力应急的方案
在高压输电线路、变电站及其他带电作业区域,吊车等大型施工机械在作业过程中存在误入安全防护距离的风险,可能引发电弧闪络、触电事故或设备损坏。为保障作业人员和设备安全,同时提高电力应急响应能力,采用近电预警装置对吊车进行实时监测与预警显得尤为重···
2025-05-05
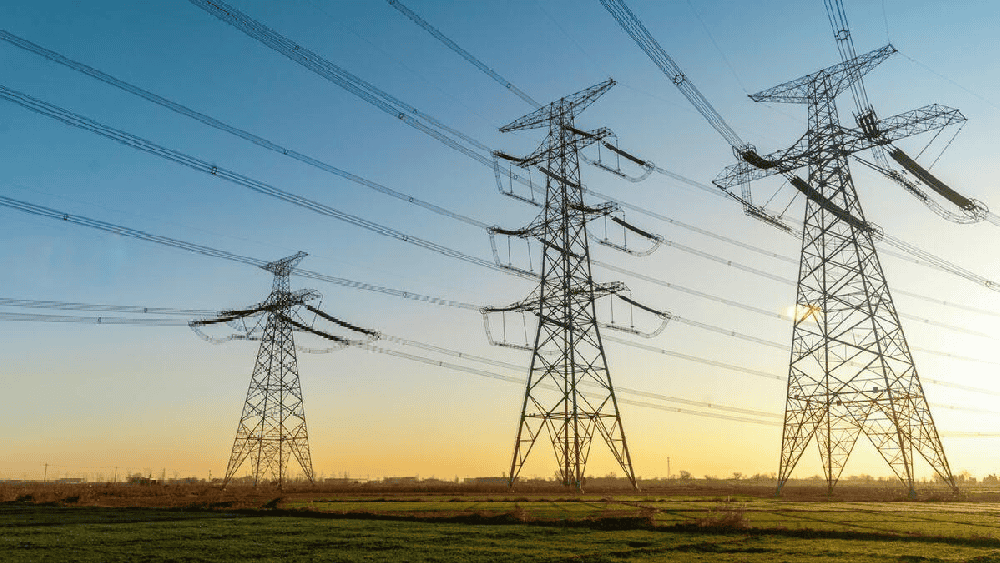
智慧电网应用方案
智慧电网作为未来电力系统的重要发展方向,通过信息化、智能化手段,不仅能实现电能的高效分配和节能减排,还能显著提升系统安全性和用户服务水平。该方案以技术创新和系统集成为基础,通过分阶段实施和持续优化,推动传统电网向现代化智能电网转型,构建高效···
2025-05-04

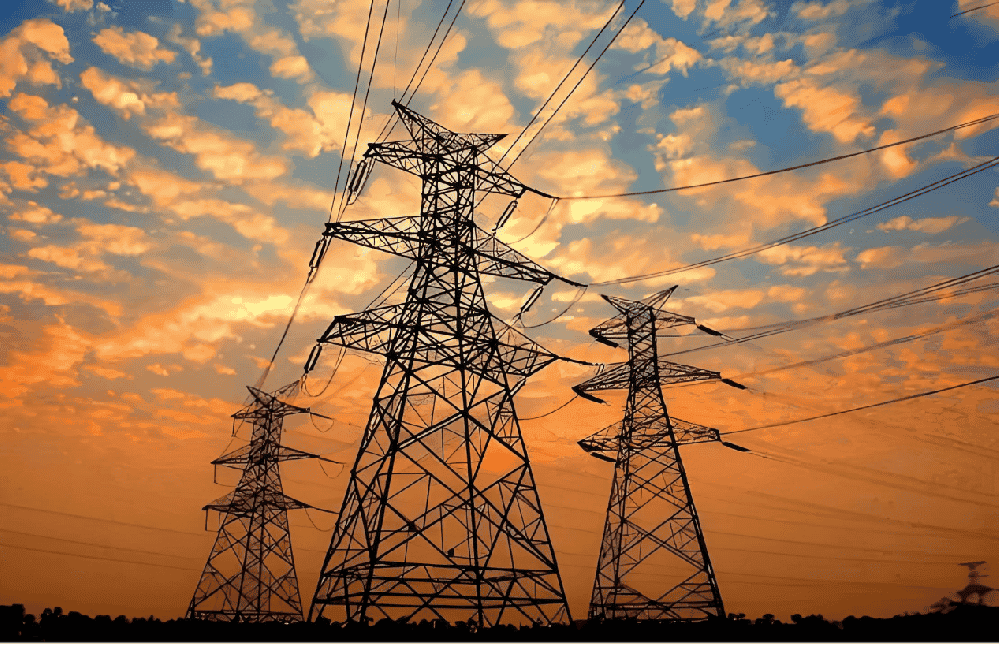
电力应急
电力应急是确保电力供应稳定与社会正常运转的重要工作。它针对自然灾害、事故等突发事件,迅速响应,组织抢修救援,保障电力设施安全。电力应急体系具备高效的信息汇集、调度和决策支持能力,确保应急指挥科学有序。电力应急人员勇敢专业,为守护万家灯火默默···
2024-04-16

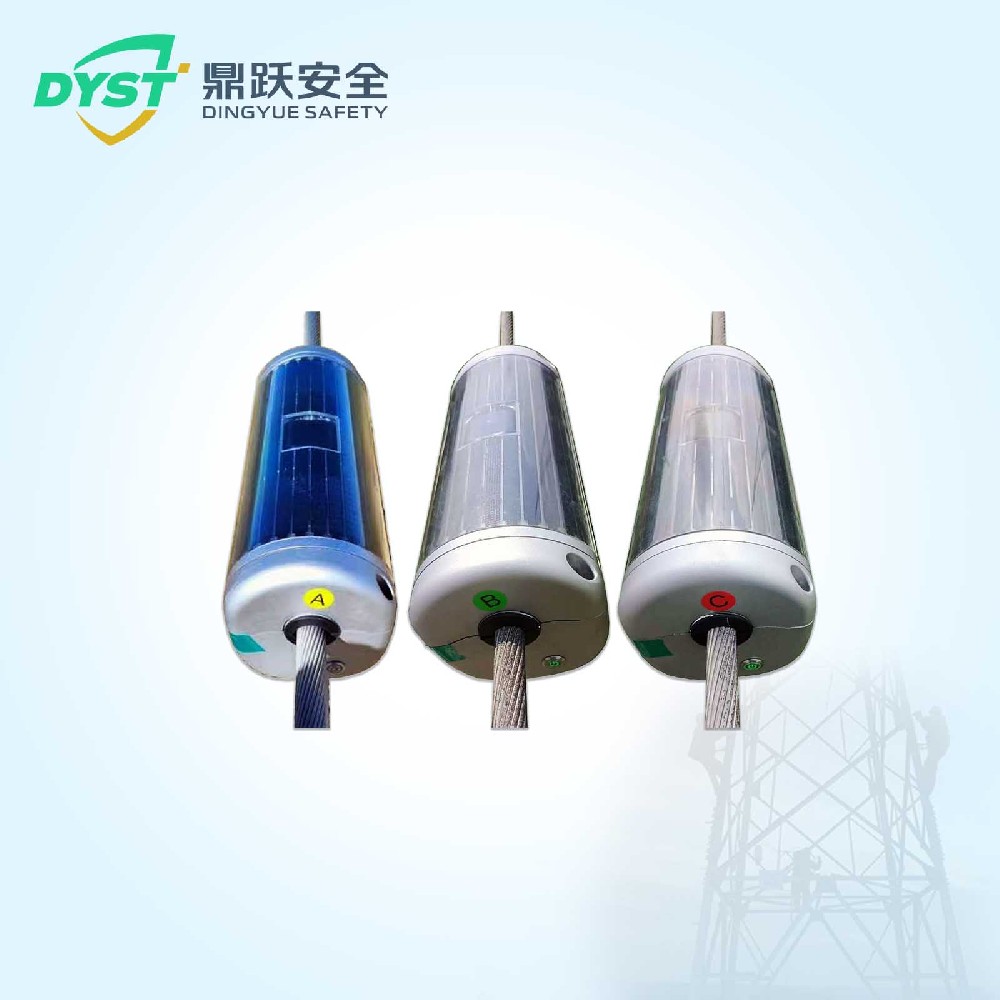
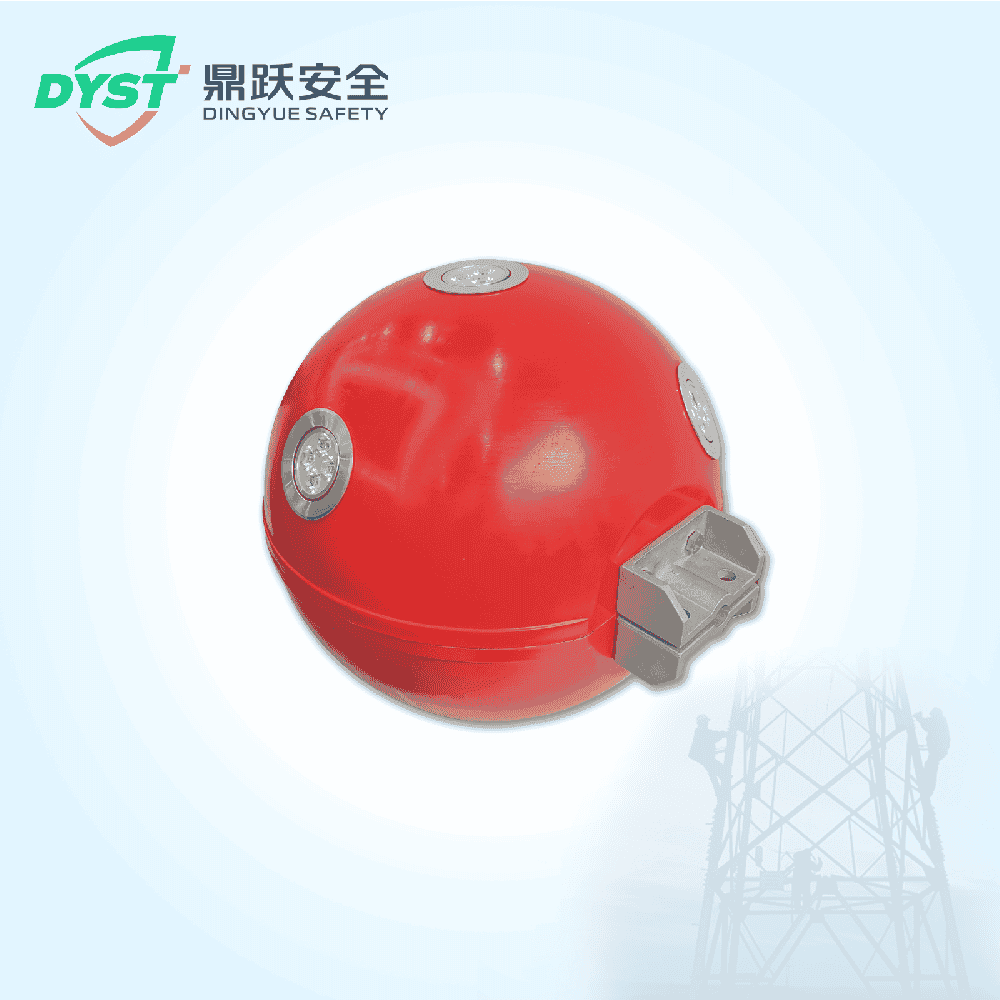
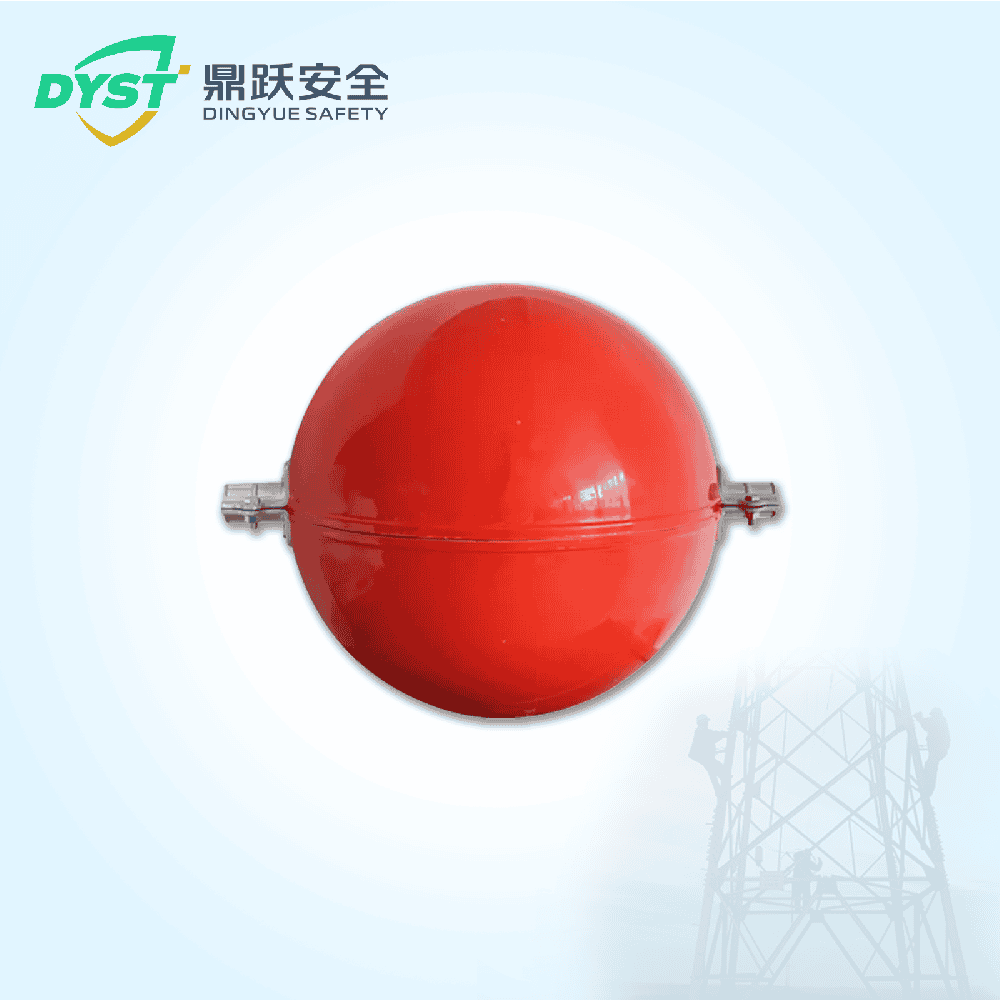
高压线防外破警示球案例
深圳市鼎跃安全技术有限工公司的航空警示球 又叫做高压线防外破警示球,适用于机场附近的架空输电线路,尤其是超高压(220kV以上)输电缆线、跨江输电缆线,应在线路上设置形状醒目的航空标志球(航空警示球),以提供警示标志。航空标志球(航空警示球···
2023-10-25
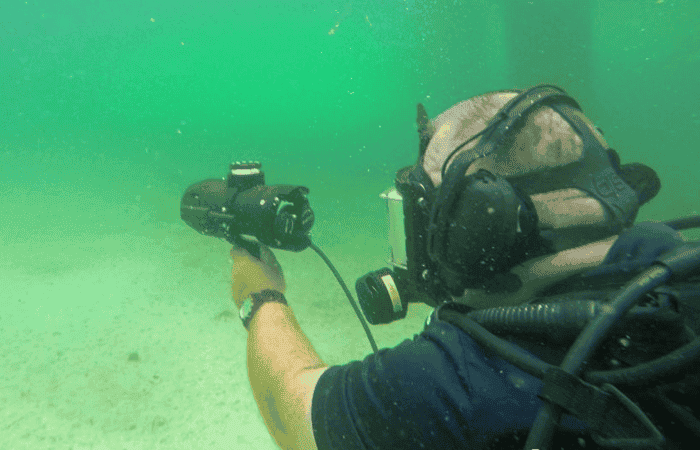
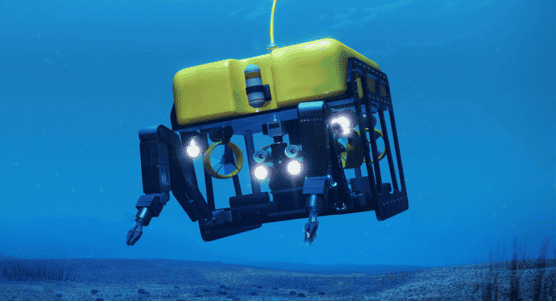
水下通信解决方案:潜水通信定位系统
潜水通信定位系统集水下通信、人员定位及安全监控于一体的综合解决方案。其利用声波技术和无线通信,实现水下环境的实时语音通信、数据传输和位置跟踪。
2024-10-18

流速检测仪在环境监测的应用
流速检测仪作为一种重要的水体测量工具,广泛应用于水利工程、环境监测、科研调查和灾害预警等领域。其高精度测量、长时间续航、防水设计的特点,为其在水资源管理和环境保护提供更加可靠的数据支持。
2024-08-24

如何应对水域安全问题
随着汛期的到来,水域安全问题变得尤为重要。为了确保个人和他人的安全,我们需要掌握一些基本的安全知识和应对策略。以下是关于水域安全的一些建议,跟随鼎跃安全一起学习:学习游泳:学习游泳是保护自己在水域中安全的基本要求。掌握基本的游泳技能可以帮助···
2024-05-07

水域救援方案
水域救援方案是一个复杂且系统的过程,涉及现场勘查、救援力量部署、设备器材选择、救援行动执行以及通讯联络等多个方面。救援人员需根据水域环境特点,制定合适的救援措施,并保持高度警惕,确保自身和被救人员的安全。
2024-04-12

水务水域监测方案
通过对各种传感器数据的实时采集,由多个设备组成的分布式网络传输数据,结合远程通信将数据汇集到管理中心。在系统的管理中心经数据处理修正,同时与外部系统数据交互,就在GPS地理信息平台上实时显示监控点的实际情况,能在大量水文监测数据中进行数据挖···
2023-09-25
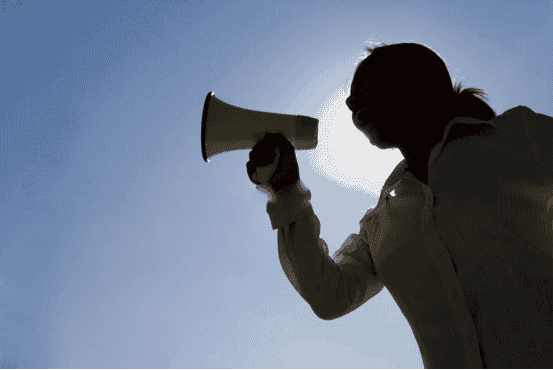
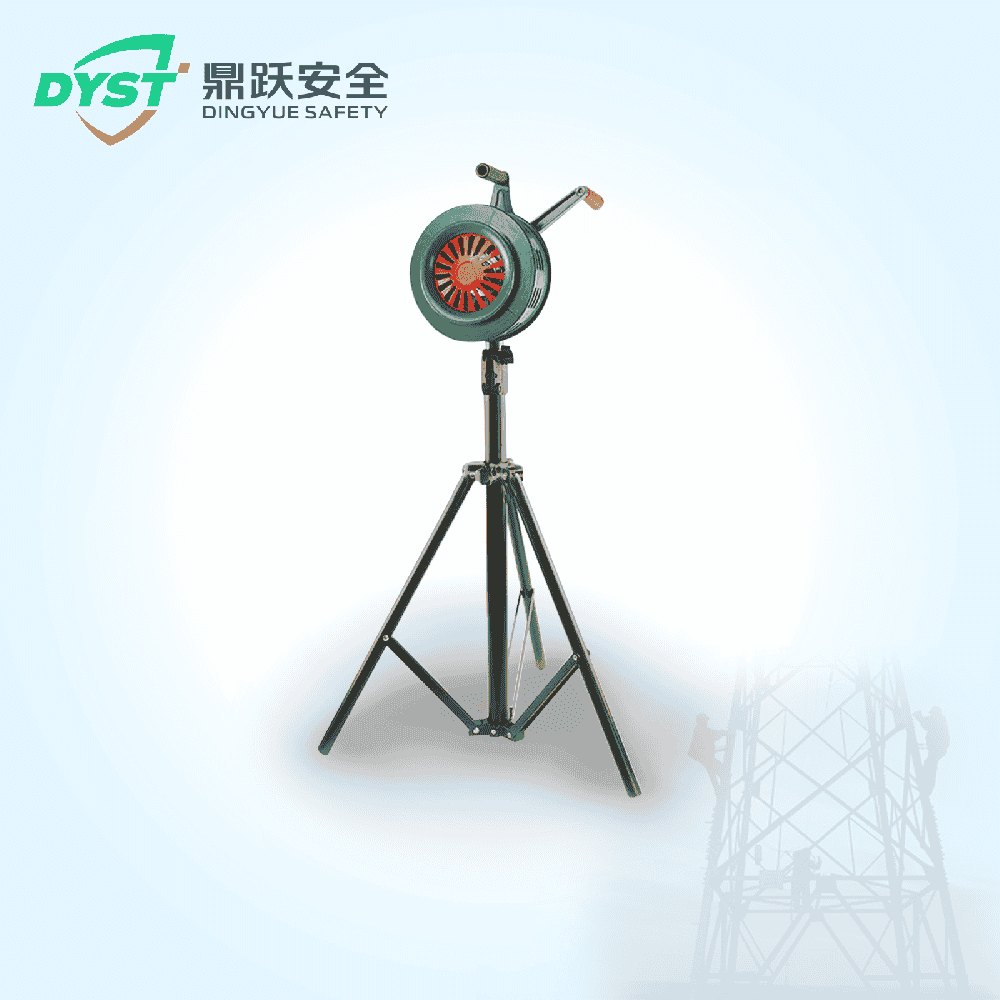
手持扩音器在应急救援中的实施方案
手持扩音器作为一种高效的声音传递工具,能够在嘈杂环境下确保指令的有效传递。其便携性和灵活性使其成为救援任务中的重要装备。
2024-10-28

筑牢洪涝线:探索领先的防洪解决方案
洪水灾害的威胁始终高悬,以预防为主的核心防洪理念就要求我们具备能够快速部署且可循环利用的防洪措施。另外,因气候变化极端天气频发致使洪涝灾害频发且强度不断增加。我们急需可靠的防洪解决方案,以在洪水来临时迅速部署,最大程度地保护民生安全,同时减···
2024-09-27

抗洪抢险案例
抗洪抢险案例在面对自然灾害时,特别是洪水这样具有破坏性的灾害时,及时有效的抗洪抢险方案至关重要。本方案旨在为各级政府、救援机构和社区提供一套系统的指导,以应对洪水灾害,最大限度地保护人民生命财产安全,减少灾害造成的损失。抗洪抢险方案是应对洪···
2024-04-17

手持式钢筋速断器应用方案与方案解析
在建筑施工、应急救援、设备拆卸等场景中,钢筋切断是一项常见却关键的任务。传统的切割工具往往需要大量的人力,操作繁琐且效率低下,难以满足现代工程的高效性和精准性要求。手持式钢筋速断器作为一种便携、高效、安全的切割工具,专为复杂场景设计,能够显···
2024-12-14

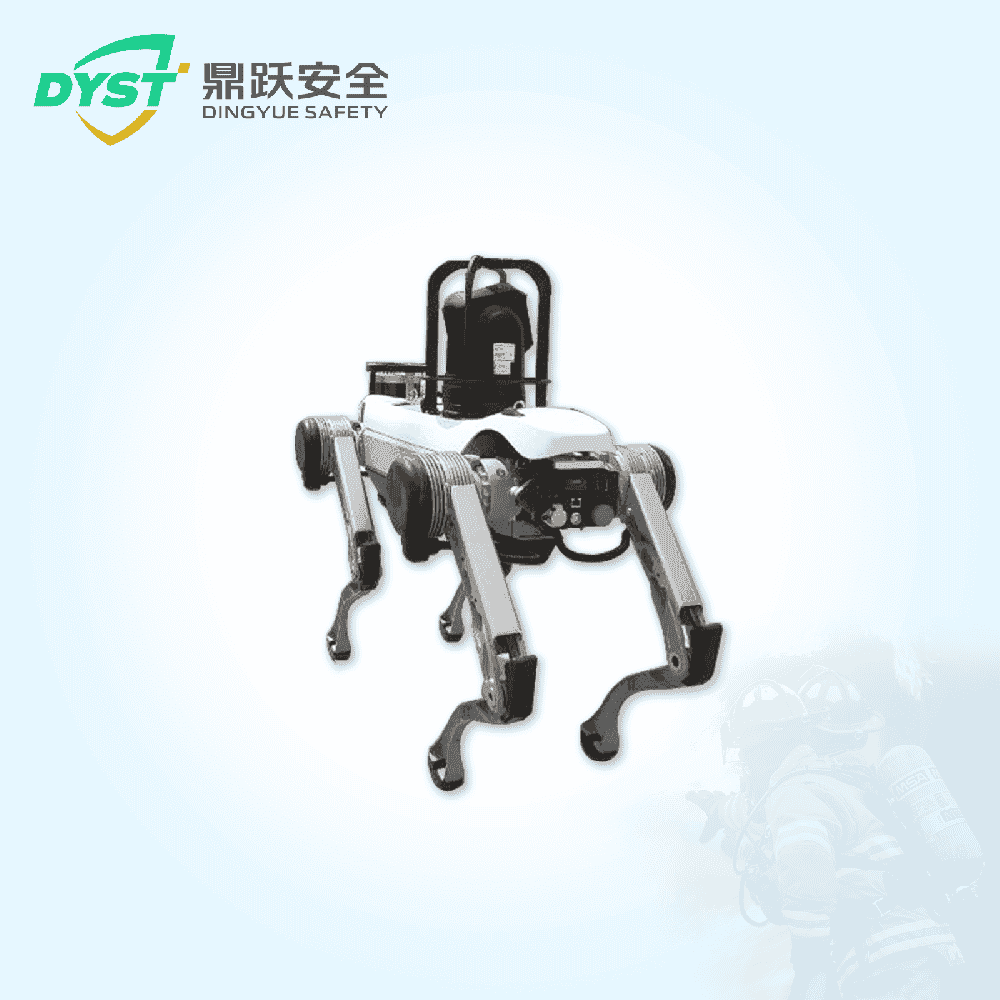
巡检四足机器人应用方案与解析
随着工业化和智能化的快速发展,电力、石油化工、隧道等特殊场景的巡检需求日益增长。这些环境往往具有高风险、高复杂性和恶劣条件(如高温、高湿、辐射、毒气等),对传统人工巡检提出了严峻挑战。巡检四足机器人作为一种智能化、稳定性高的自动巡检设备,能···
2024-12-08

牵拉器在地震中的实际应用案例
牵拉器是一种用于应急救援中的重型机械设备,主要用于拉动或牵引被困物体、救援被困人员,或者支撑、稳固结构物。
2024-11-23

水陆两用便携式漏电探测仪,水陆无阻,轻松探漏_鼎跃安全
水陆漏电探测仪能在水陆两种环境下工作,可精准探测漏电隐患。在水中,能快速确定漏电源头及漏电范围,保障水域安全;在陆地上,对复杂的电路系统也能有效检测。其具有高灵敏度的传感器和先进的探测技术,操作简单便捷,能及时发出警报,广泛应用于电力检修、···
2024-11-06

地震地灾中的智能仪器的作用及实施方案
地震和地质灾害(如滑坡、泥石流等)往往发生突然,给人员和财产带来巨大损失。在应对这些灾害时,各类智能仪器提供了宝贵的实时监测、精确探测和救援支持,能够显著提高救援效率并减少损失。
2024-11-04

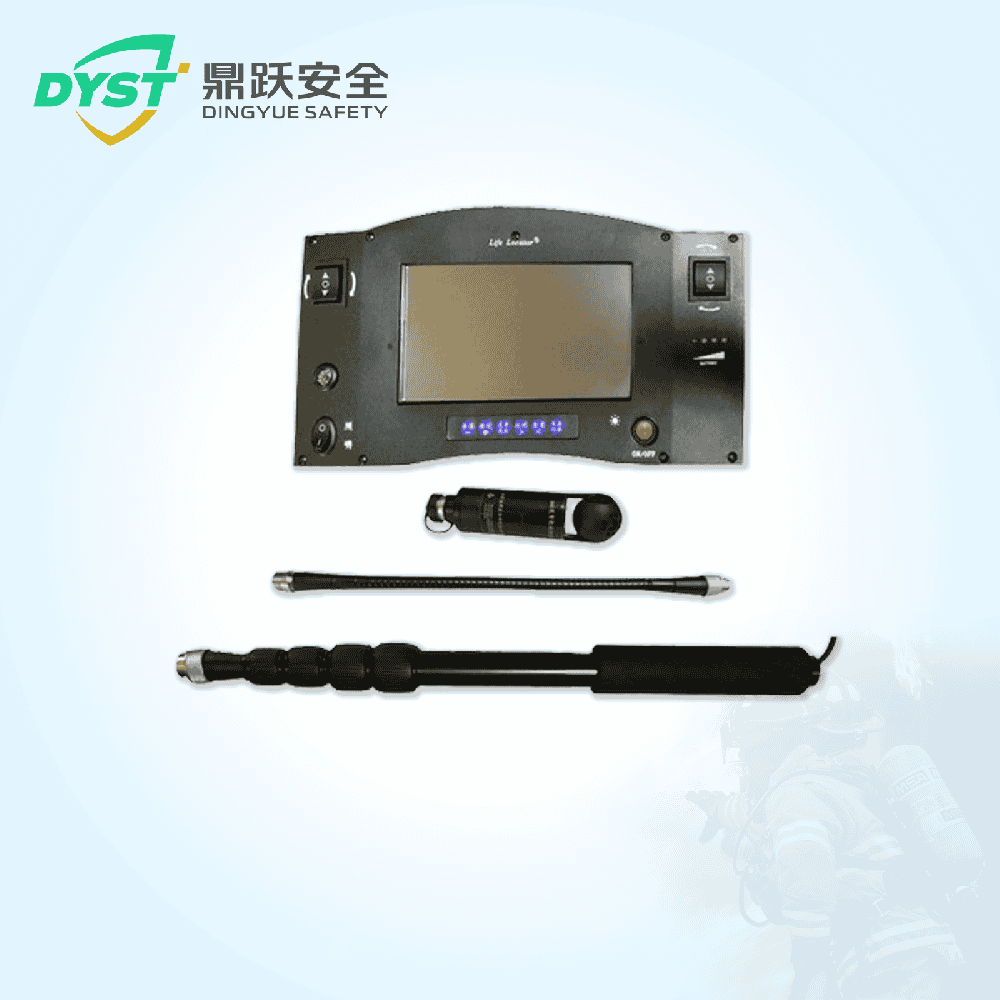
雷达生命探测仪在事故救援中的使用方案
雷达生命探测仪在事故救援中的应用,极大提高了生命迹象的发现率和救援效率。通过规范的操作、有效的信息反馈、严格的设备管理与安全措施,能够更好地保障被困者的生还机会,为救援队提供重要的技术支持。
2024-10-31

多模融合终端(PDT)的应用方案
多模融合终端(PDT)是一种集多种通信模式于一体的高端通信设备,广泛应用于应急救援、安防、公共安全、物流运输等领域。
2024-12-30

高带宽智能自组网单兵的应用方案
高带宽智能自组网单兵系统是集无线通信、自组网技术与智能设备于一体的移动通信平台。该系统主要为应急救援、军事作战、执法行动等场景提供实时高效的通信与信息共享能力。
2024-12-21

应急自组网解决方案:构建灵活可靠的应急通信网络
应急自组网广泛应用于自然灾害救援、公共安全事件和临时活动保障等场景,为救援行动提供强大的通信支持。
2024-09-02

三防台风预警方案
害的发生的随机性,在较短的时间内能造成较大损失的特沿海台风是海洋重要灾害之一,具有突发性,灾点,每年都有一定数量的发生,造成沿海的重大资源损失和居民生命财产安全隐患。一旦有台风警示:预警预防、宣传、监控、监测、管理是否及时,重要原因都取决于···
2023-09-25
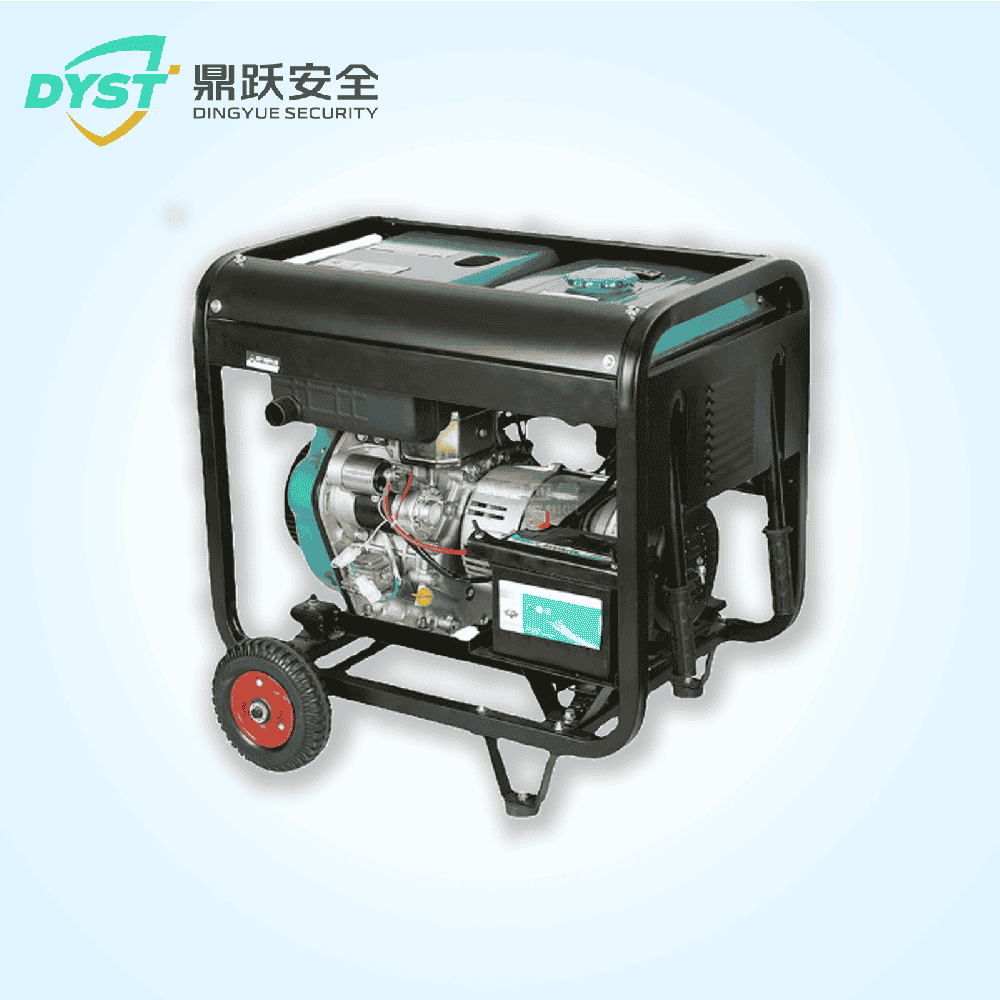
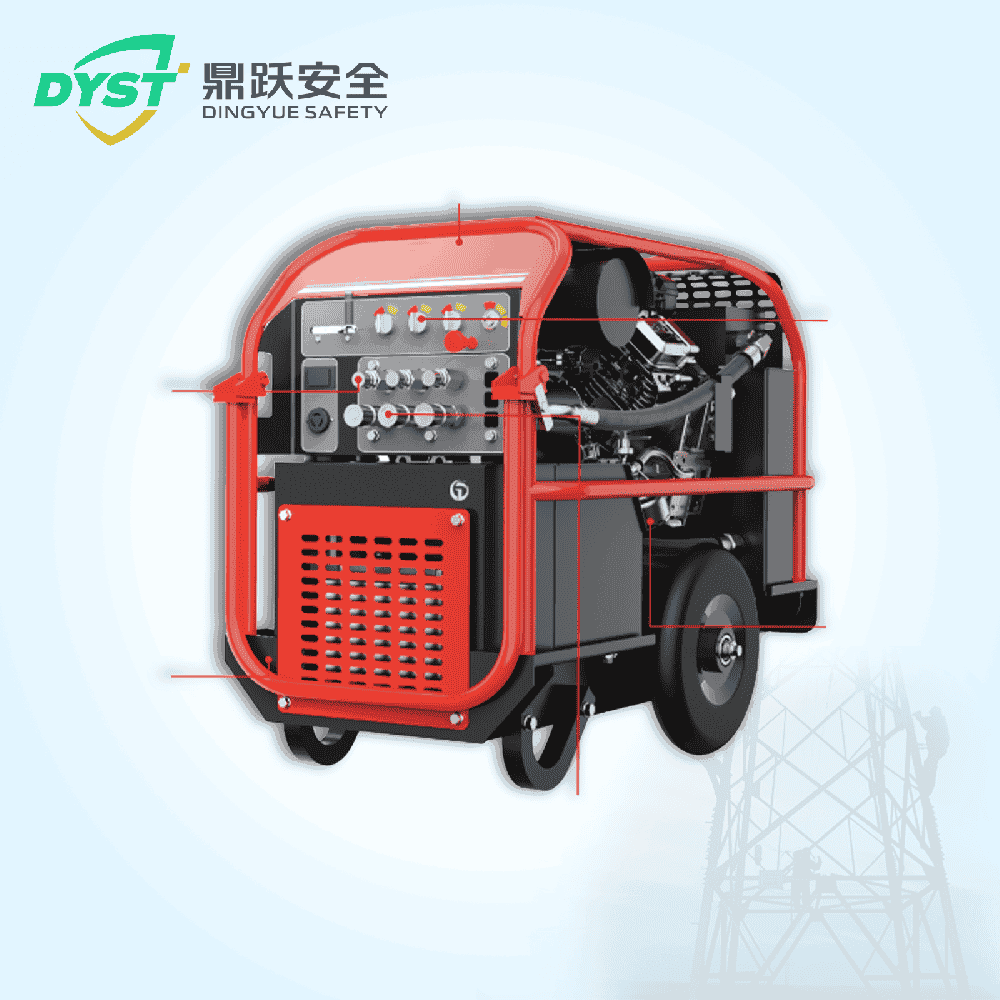
汽柴油发电机在实际救灾中的解决方案
汽柴油发电机在救灾中的应用不仅仅是为应急救援提供电力支持,更是保证救援工作高效进行、减少灾后影响的重要工具。通过合理的选型、配置和燃料管理,汽柴油发电机能够有效地为灾区提供持续电力,为灾后恢复提供重要保障。因此,发电机的准备和应用,是每一个···
2025-02-03

应急照明系统:360°移动全景照明系统应用案例
某沿海城市因强台风侵袭,大范围区域出现断电、道路中断等情况,给救援行动带来了极大挑战。特别是在夜间,由于缺乏照明,救援队伍的行动效率受到严重限制,灾区群众的安全得不到保障。在此次救援中,360°移动全景照明系统发挥了重要作用,为夜间救援工作···
2025-01-19

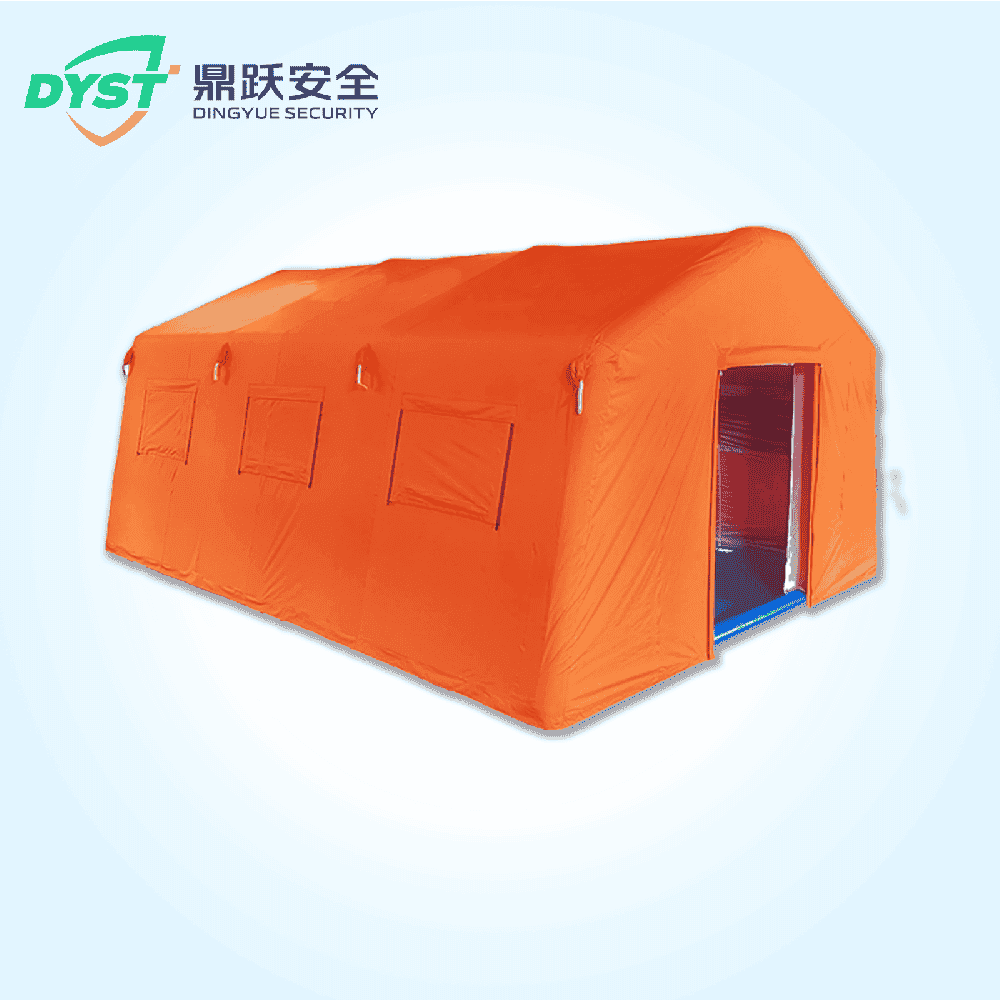
移动厕所部署:确保灾区群众如厕需求与卫生防线的综合方案
移动厕所的部署是灾后恢复工作中至关重要的一环,通过科学规划、合理布局、严格管理和有效维护,能够真正为灾区群众提供一个安全、卫生、舒适的如厕环境,更是推动灾区社会秩序和社区生活迅速重建的基础。
2024-10-24

解决灾后民生难题:应急电源车、发电机和净水车必要部署
在灾后救援与重建工作中,应急电源车、发电机和净水车的综合部署至关重要。三者协同作用,能够共同解决灾后民生难题,为受灾群众提供稳定的电力供应和安全的饮用水,加快灾后救援与重建的进程,恢复受灾地区的正常生产生活秩序。
2024-09-11

城市综合执法方案
城市日常巡逻执法和应急协同调度是城管执法行业的工作特点和重点。执法人员依靠日常的巡逻工作发现违章搭盖、占道摆摊等行为,以教育、警告或罚款等形式进行规范管理。当发生突发事件时,指挥中心调度执法人员前往现场规范管理或是协助其他部门执法人员(如工···
2023-09-25

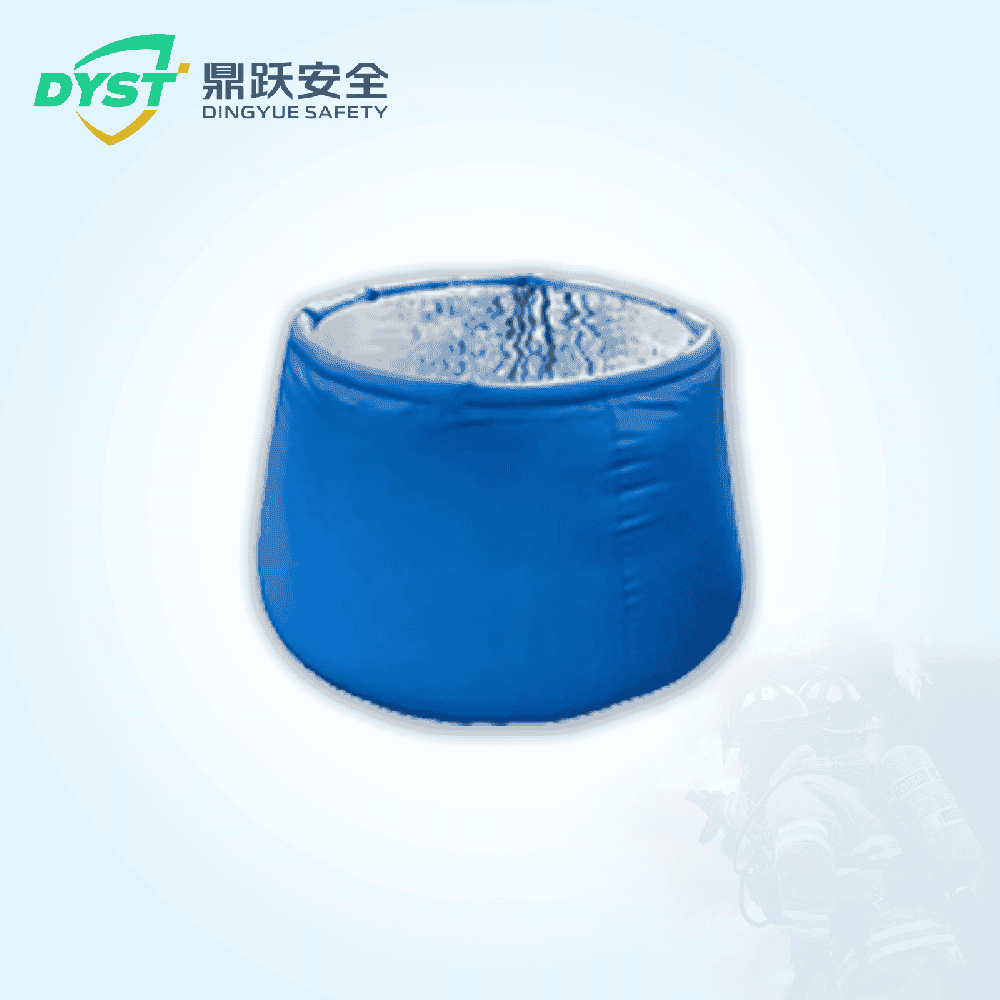
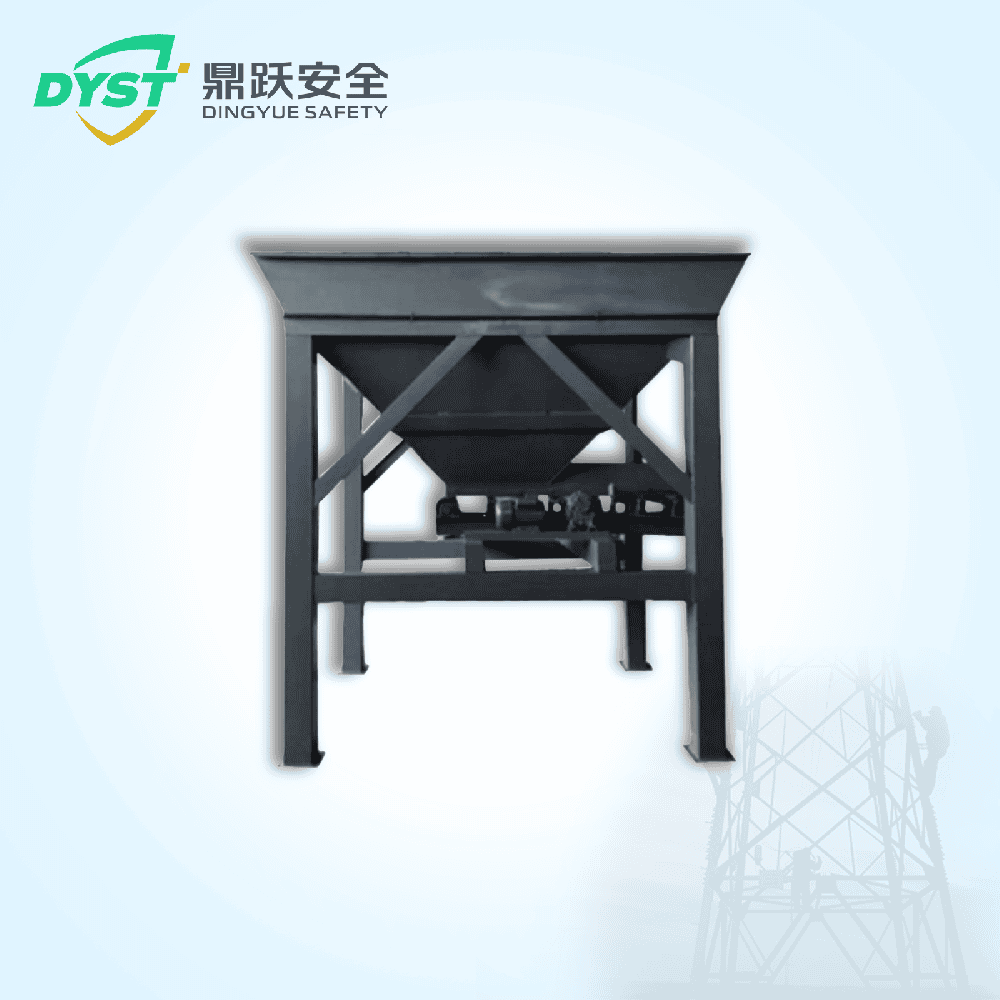
移动蓄水池:森林防火的灵活水源保障与智慧储水革新
随着全球气候变化加剧,森林火灾频发且破坏力增强,传统消防水源供给模式面临严峻挑战。山区地形复杂、水源分布不均,导致火灾初期扑救效率低下。
2025-04-18

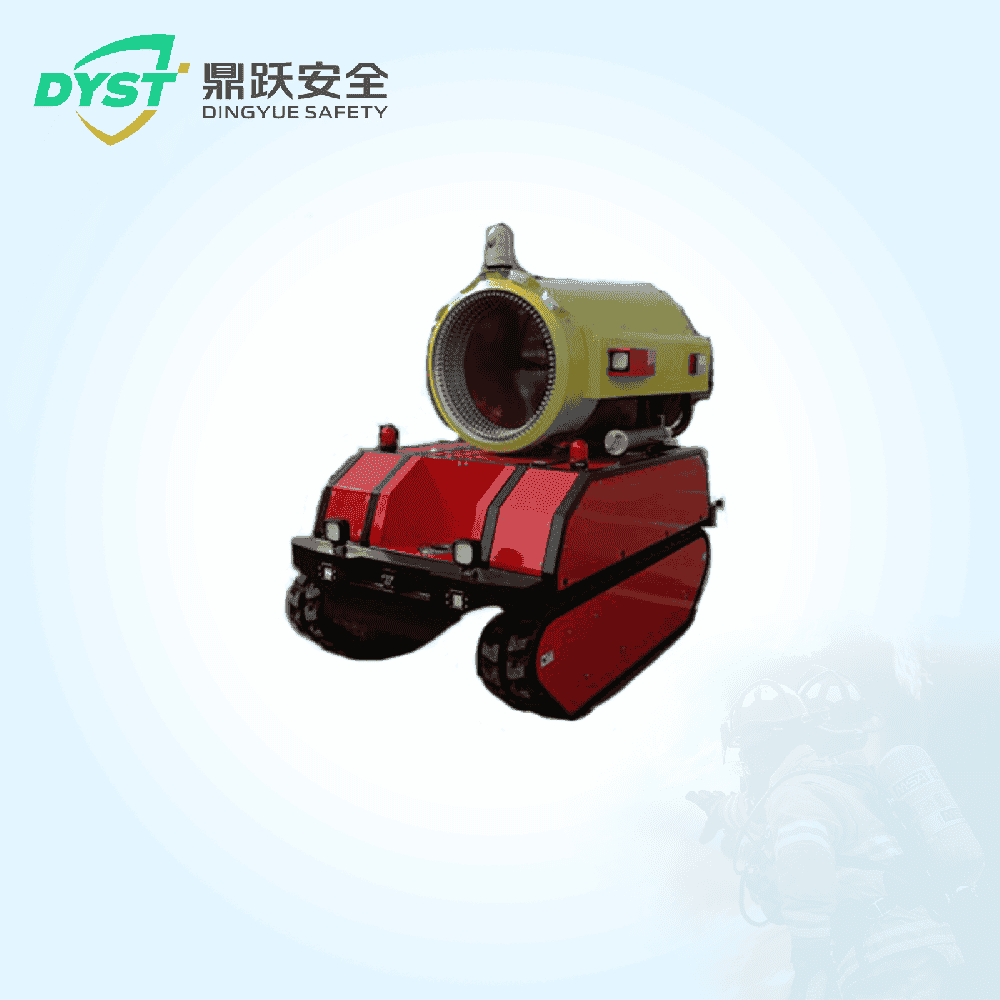
便携式移动消防炮:灾害救援与消防灭火的高效解决方案
在灾害救援和消防灭火领域,便携式移动消防炮作为一种高效、灵活的灭火设备,正逐渐成为应对火灾事故的重要工具。随着火灾事故的复杂性和多样性不断增加,传统消防设备在某些场景下难以快速响应和有效灭火。便携式移动消防炮以其轻便易携、高效灭火、操作灵活···
2025-04-14

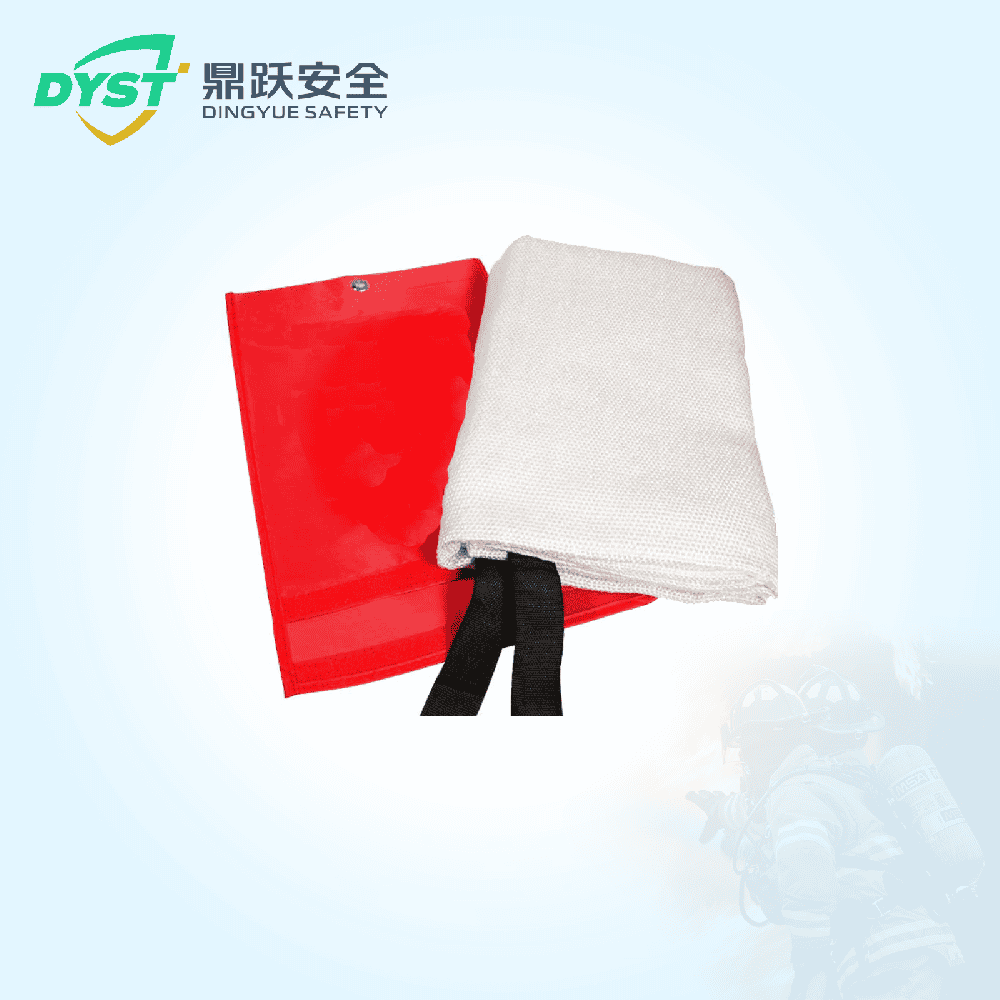
消防避火服:集成机制防护、隔热抗撕,筑牢生命防火墙
消防避火服集成的机制防护、隔热抗撕性能和人体工程学设计,为消防员在火场中的生命安全筑牢了一道坚固的防火墙。
2024-10-29

有毒有害气体检测仪:为火灾及化学品单位量身打造的毒气检测解决方案
面对化工、石油石化、制药等行业中潜在的化学品泄漏风险,快速、精准的毒气检测成为保障员工安全、防止环境污染以及减少财产损失的关键。依据《危险化学品单位应急救援物资配备要求》,企业必须配备相应的应急救援物资,其中有毒有害气体检测仪作为关键的应急···
2024-09-04

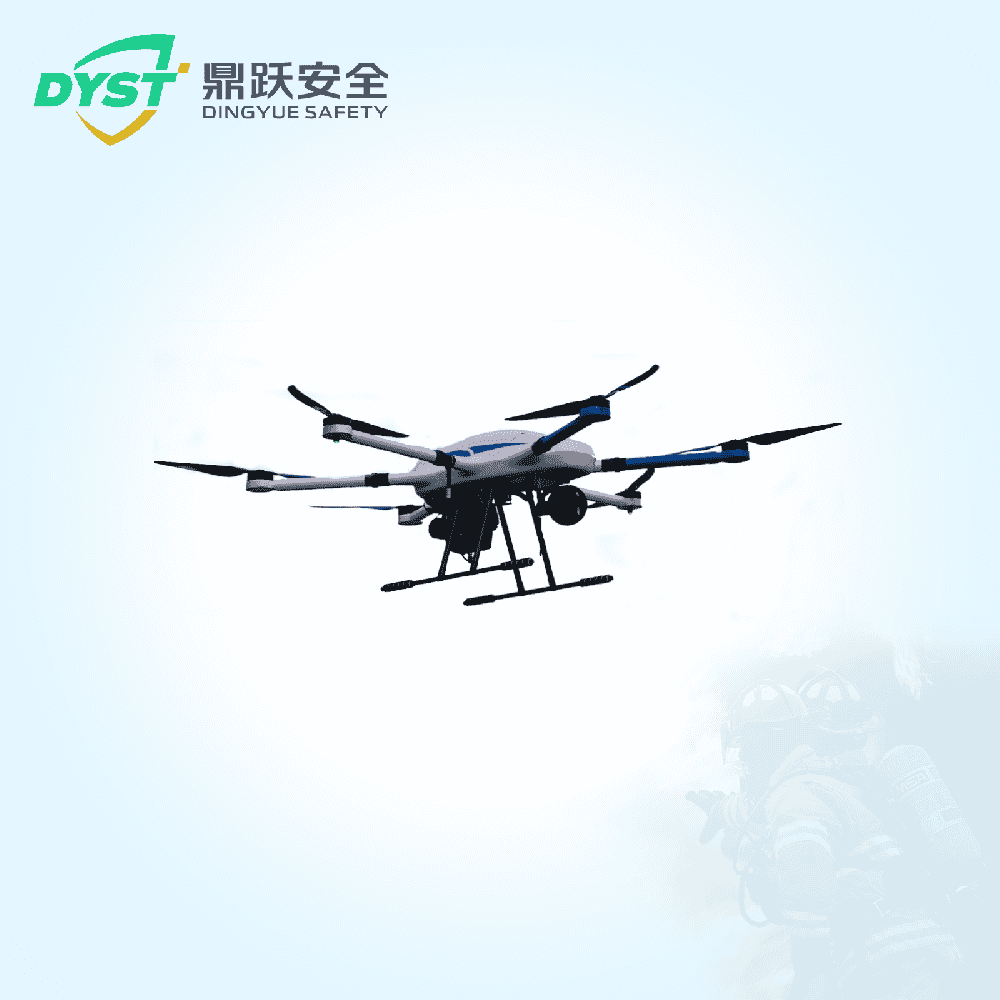
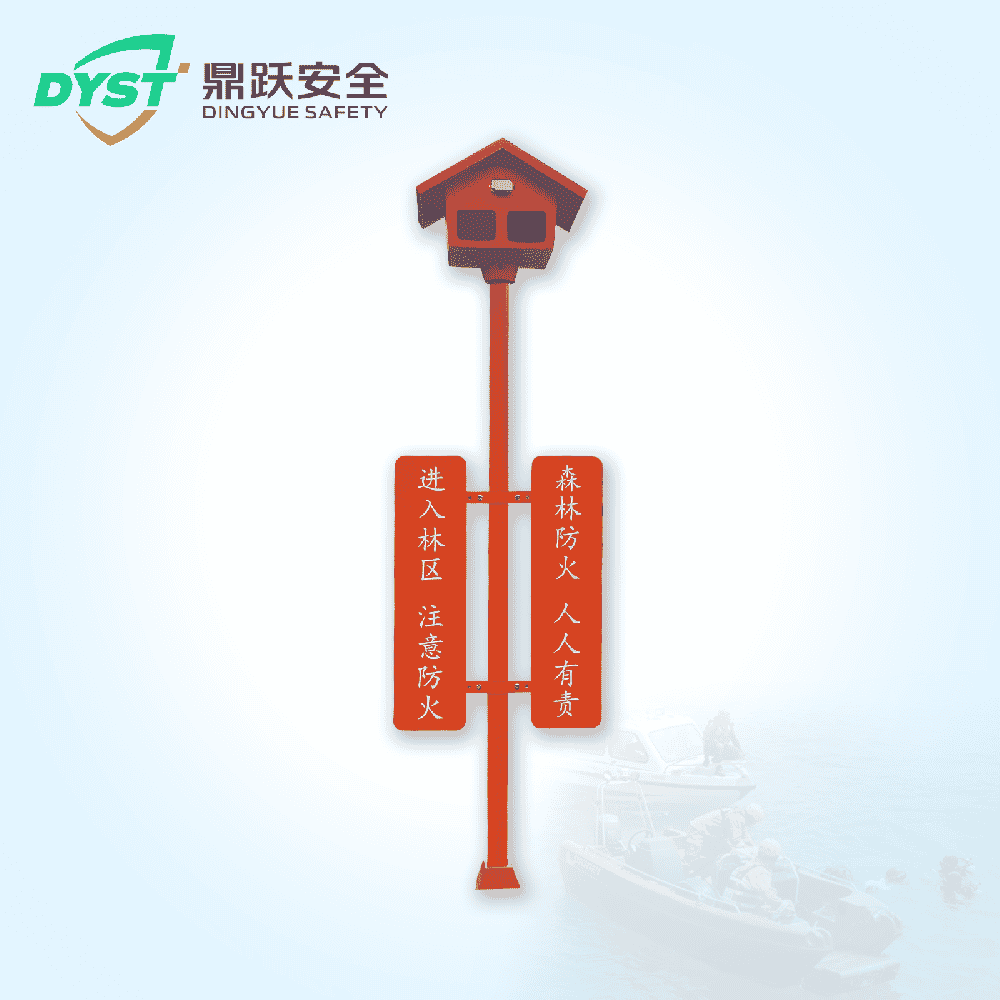
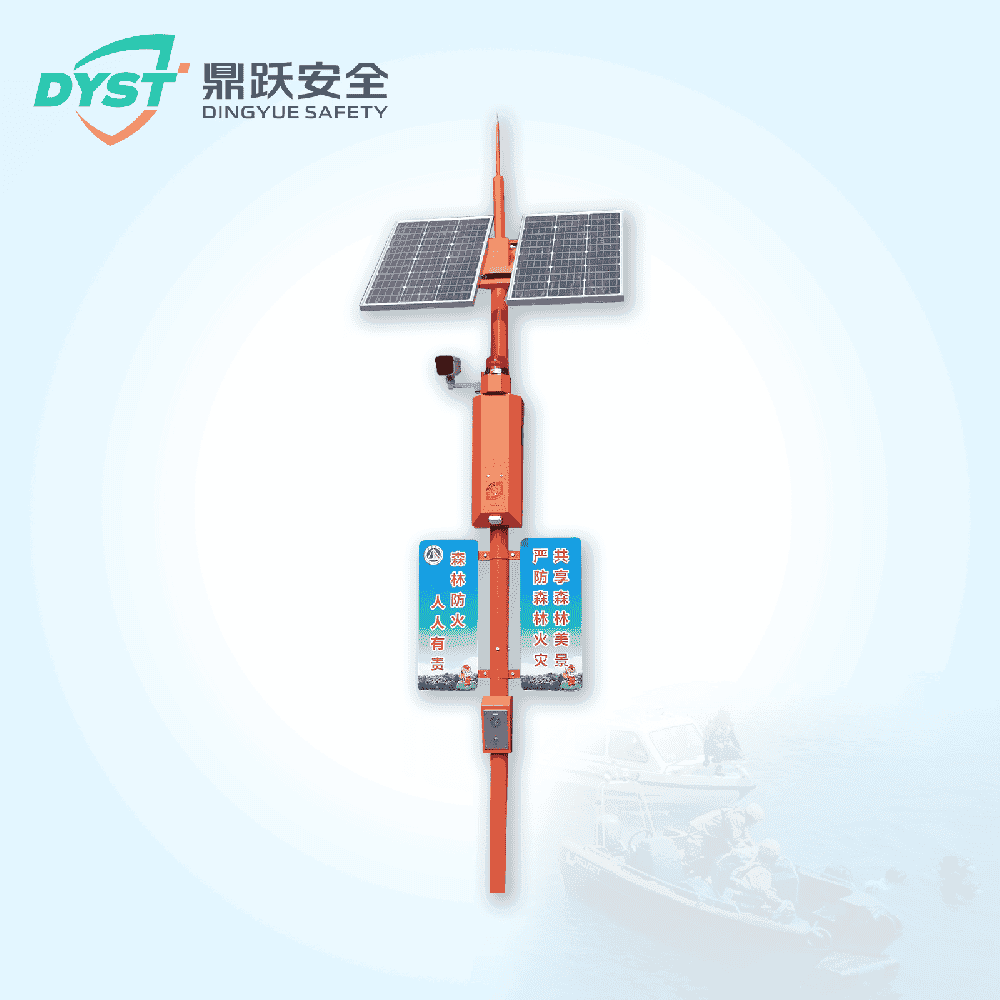
无人机森林防火巡检解决方案概述
随着全球气候变化和人类活动的加剧,森林火灾已成为一种日益严峻的自然灾害。传统的森林防火巡检方法常常受到地形复杂、人力资源不足和视野受限等因素的制约,难以实现对广阔森林区域的全天候、全方位监控。无人机技术的迅速发展为森林防火提供了一种创新的解···
2024-08-26

全面防护,消防个人防护套装护航安全
我们的消防个人防护套装采用最先进的材料与技术,提供全方位的防护。套装由阻燃面料制成,能够有效抵御高温和火焰侵袭,防止烫伤和烧伤。同时,套装的面料具备耐切割、耐刺穿的特性,即使在复杂的救援环境中,也能为消防员提供极大的安全保障。
2024-08-25
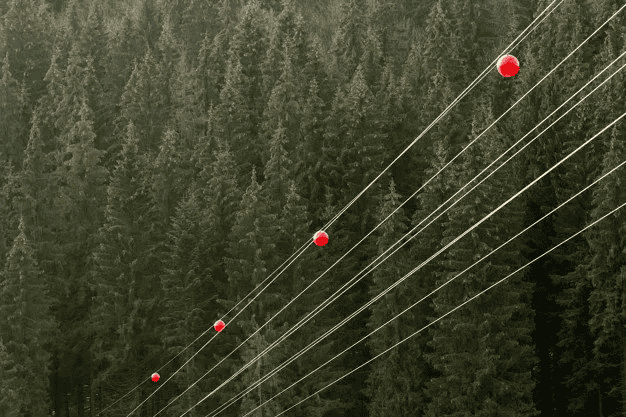
航空标志球,守护高压线路的“空中灯塔”
在电力设施密集和低空飞行活动频繁的地区,加强对输电线路航空标志球的宣传,能够让飞行员、电力工作人员以及社会公众充分了解其功能和重要性。这不仅有助于提高飞行员对输电线路的警觉性,增强电力设施的保护意识,还能促进社会各界对电力安全和航空安全的共···
2025-05-15
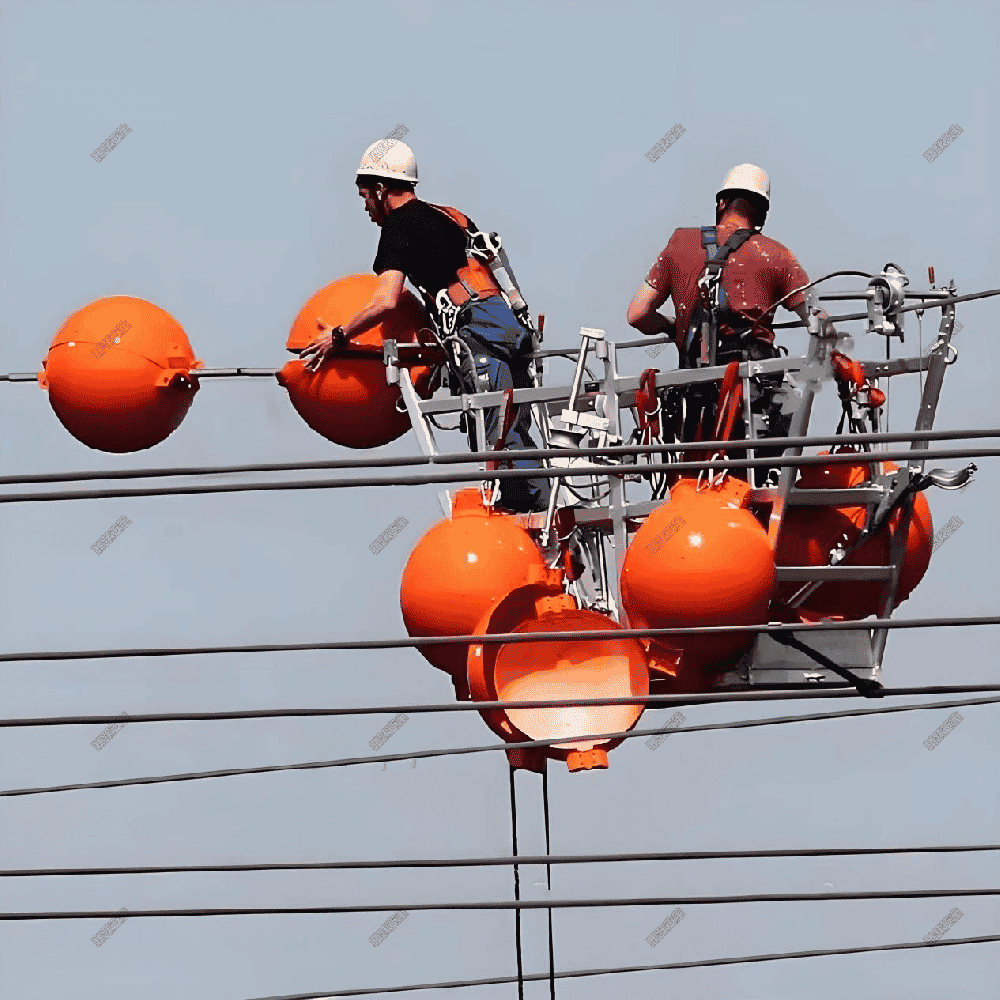
2024.05.29 输电线路航空标志球 设备安装案例
2024.5.292025新老澳门原料免费大全的输电线路航空标志球的设备安装案例
2024-06-01

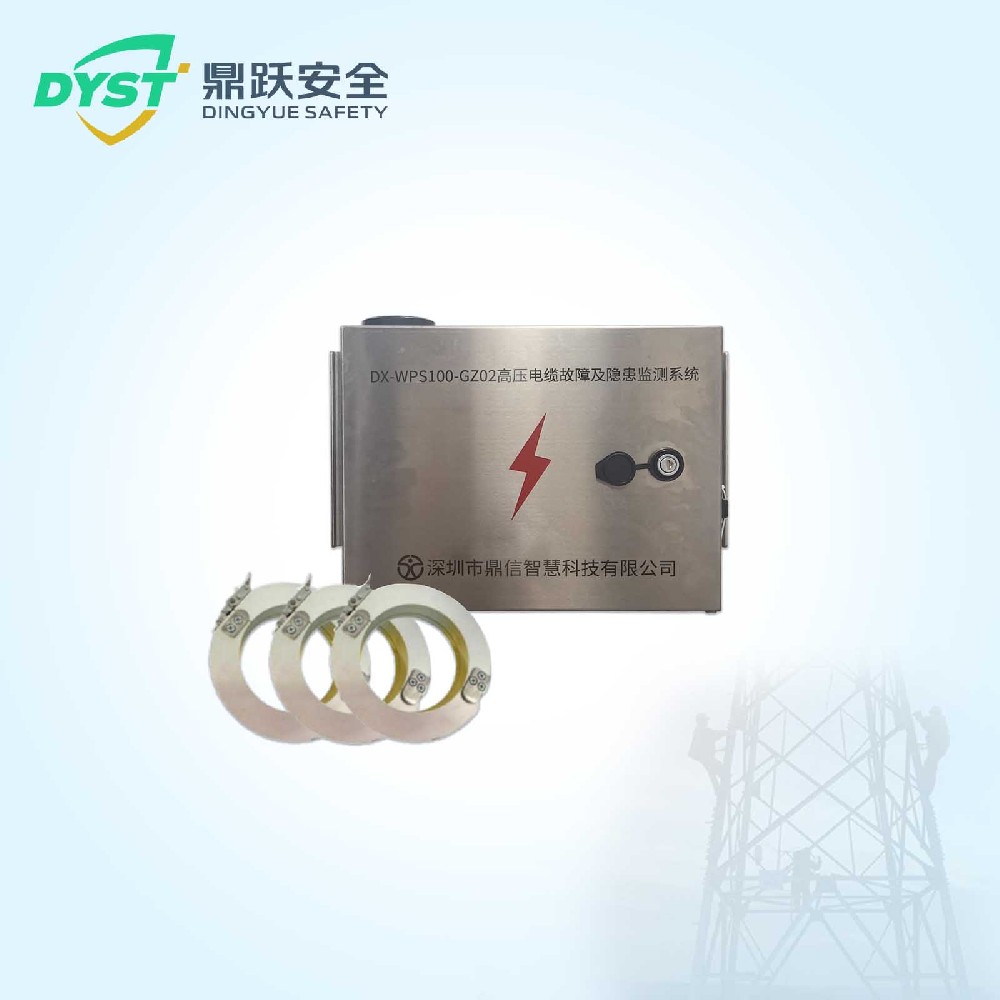
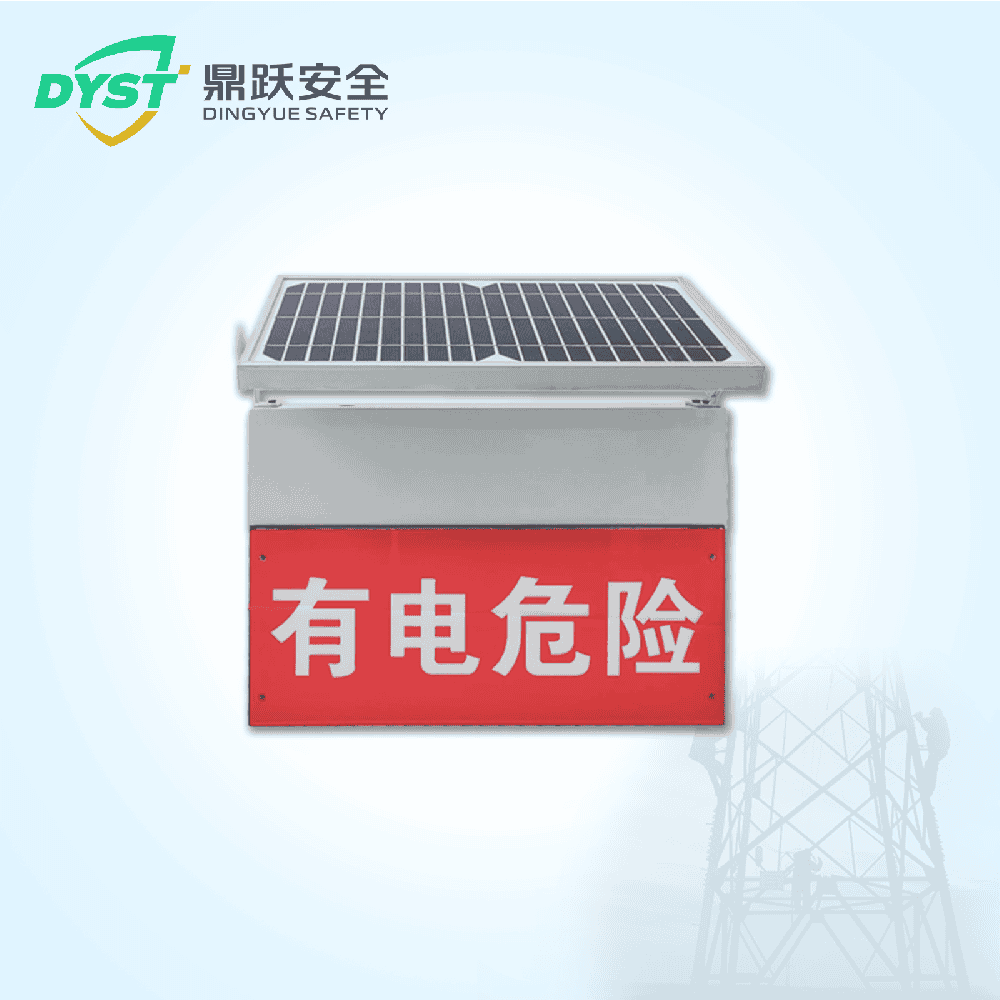
电子警示牌案例
什么是智能高压电子警示装置?智能高压电子警示装置也叫“电子警示牌”,主要用于杆塔、铁塔、输配电台区、变压器、配电柜、施工现场等有需要防触电预警的场合,以达到主动警示“高压有电危险”的防触电、防损毁电力设施的目的。其实变压器、配电柜、杆塔等电···
2023-10-25

电力智能语音警示牌案例
配电变压器,电线杆,配电房等都是户外电力设施设备,基本处于无人看守状态,那如何预防触电、防止电力设备被碰撞呢?设立安全标志、安装隔离设备、安装防护网、设备加固、定期巡检、安装监测设备,都是一些常见的预防措施,需要根据具体情况进行选择和实施。···
2023-05-03
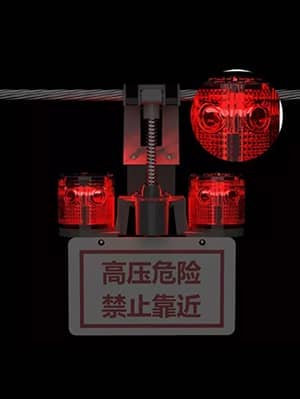
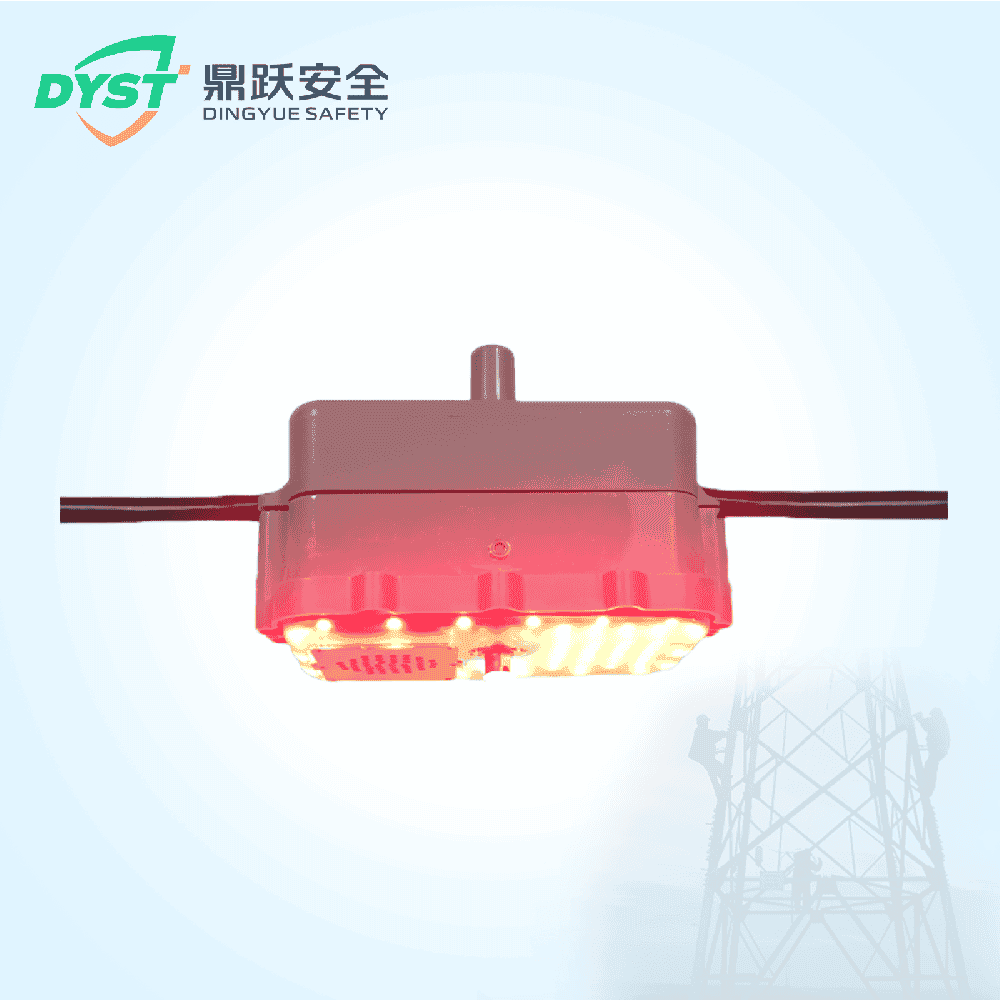
高压线防外破警示灯案例
这其实就是高压线防外破警示灯。高压线防外破警示灯是一种常见的电力防外破措施,通俗来说是一种小型、醒目的灯,这些灯通常都装有一个特殊装置,可以发出声音信号来提醒人们注意高压线存在及周围环境
2023-03-17

消防个人防护套装,无畏火海的坚实后盾
消防个人防护套装是消防员执行灭火、救援及化学事故处置任务时的必备装备,用于隔离高温、火焰、化学物质等危险因素,防止其对人体造成直接伤害。
2025-05-13

软体水枪,高效便捷的灭火利器
软体水枪作为一种新型灭火工具,凭借其轻量化设计、灵活操作及多功能喷射模式,成为现代消防体系的重要补充。例如,在2025年雅江森林火灾中,软体水枪通过快速构建防火隔离带,有效阻断了火势向居民区蔓延。其技术革新不仅提升了灭火效率,更降低了救援人···
2025-05-07

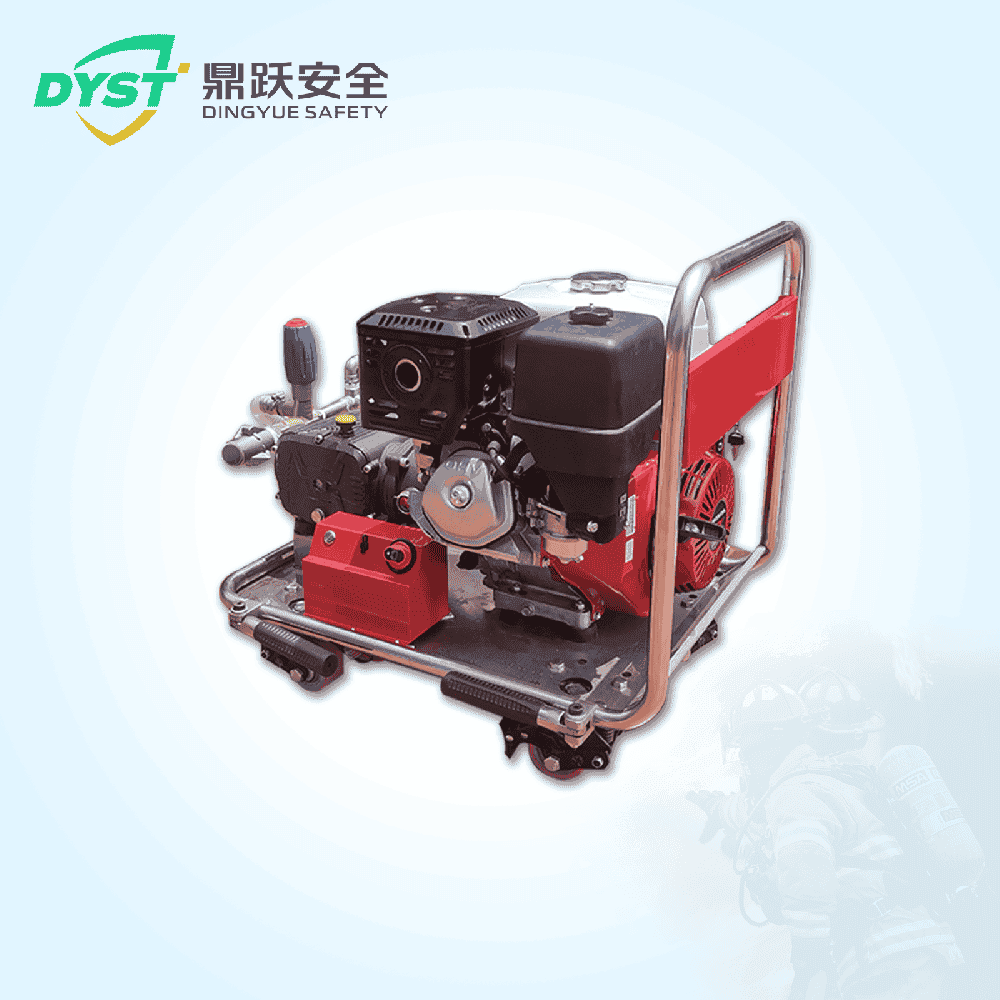
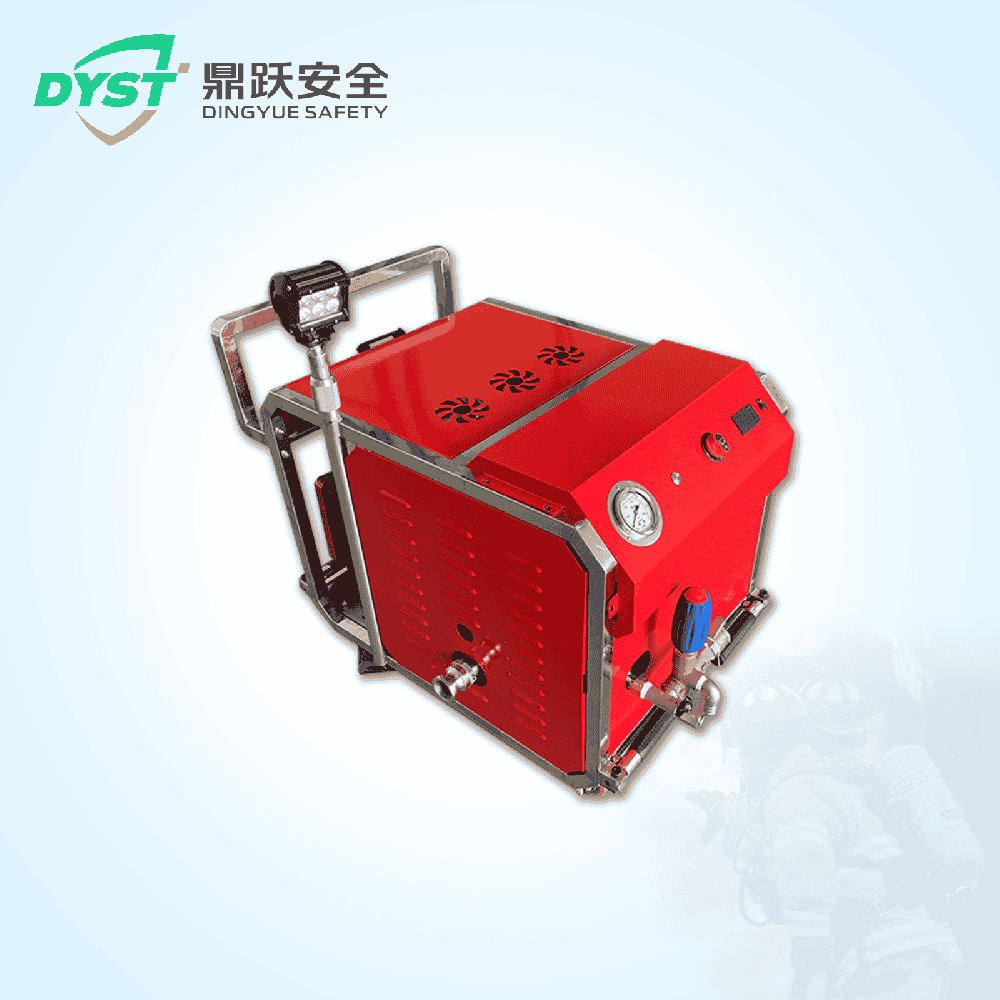
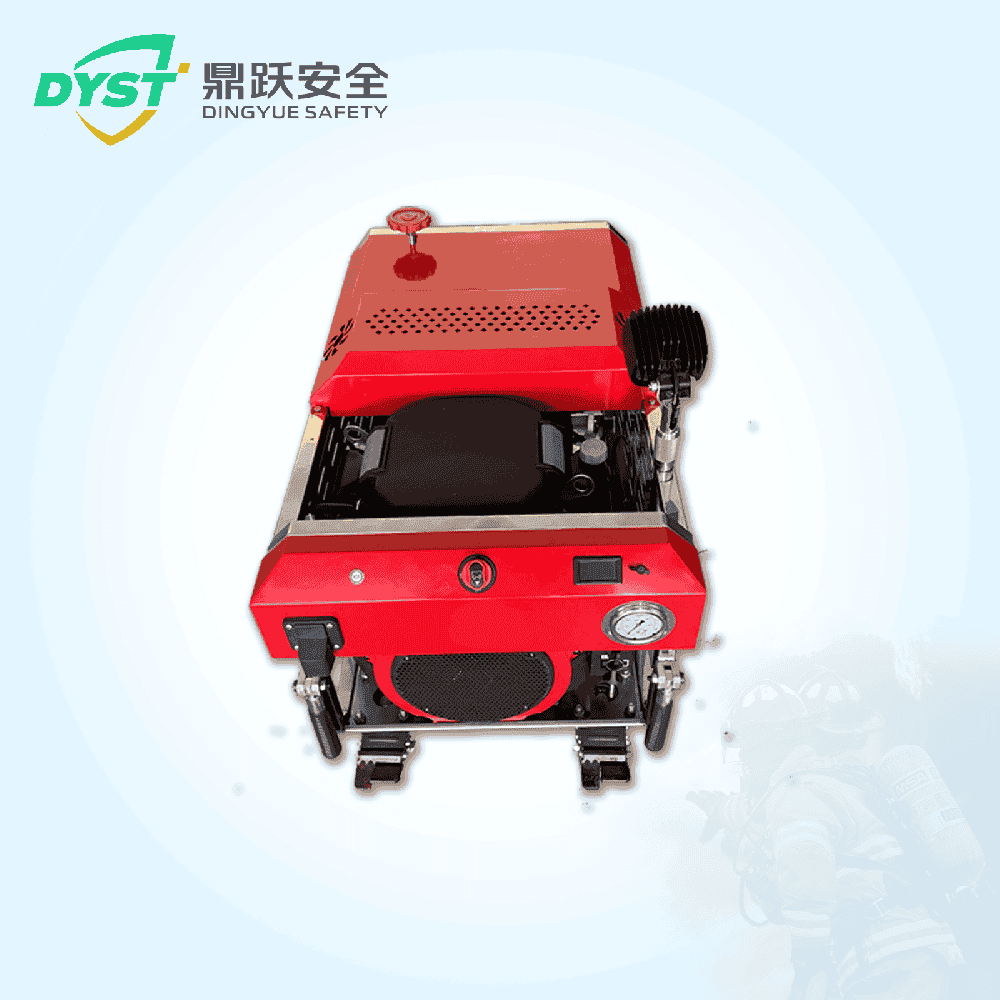
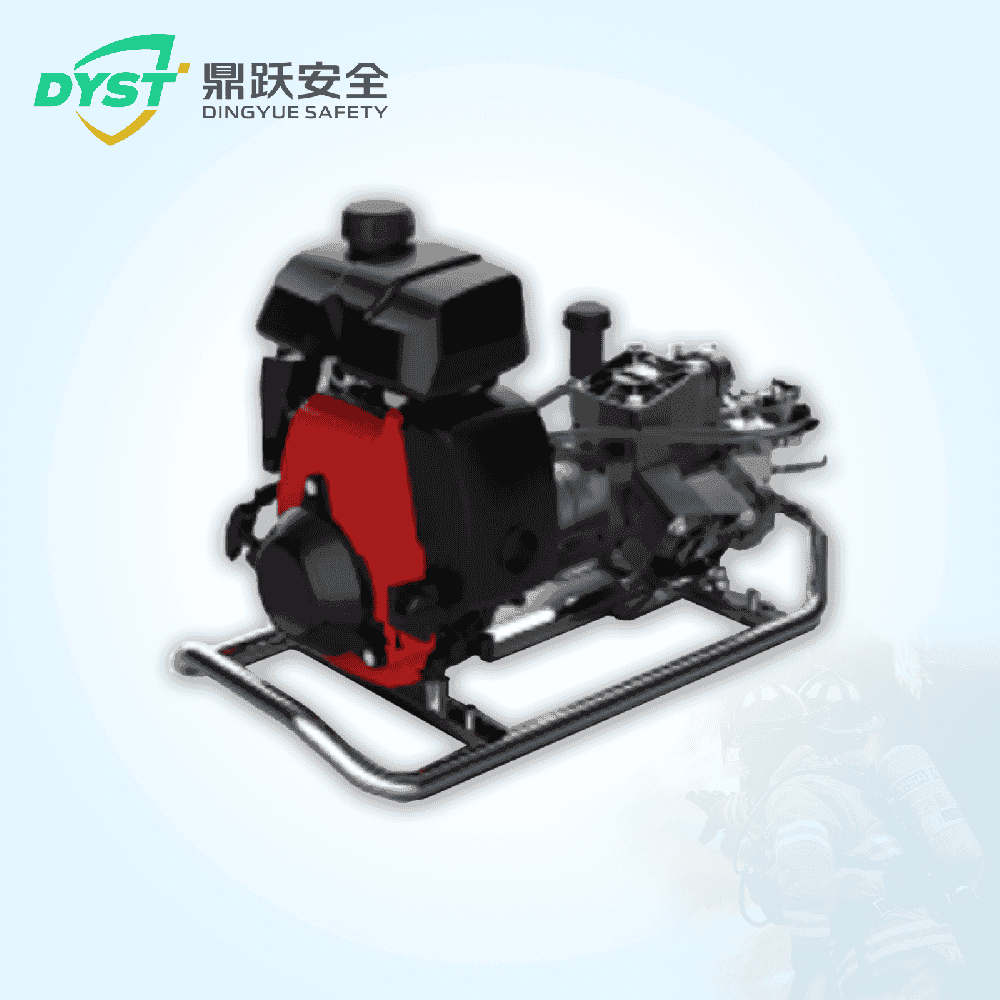
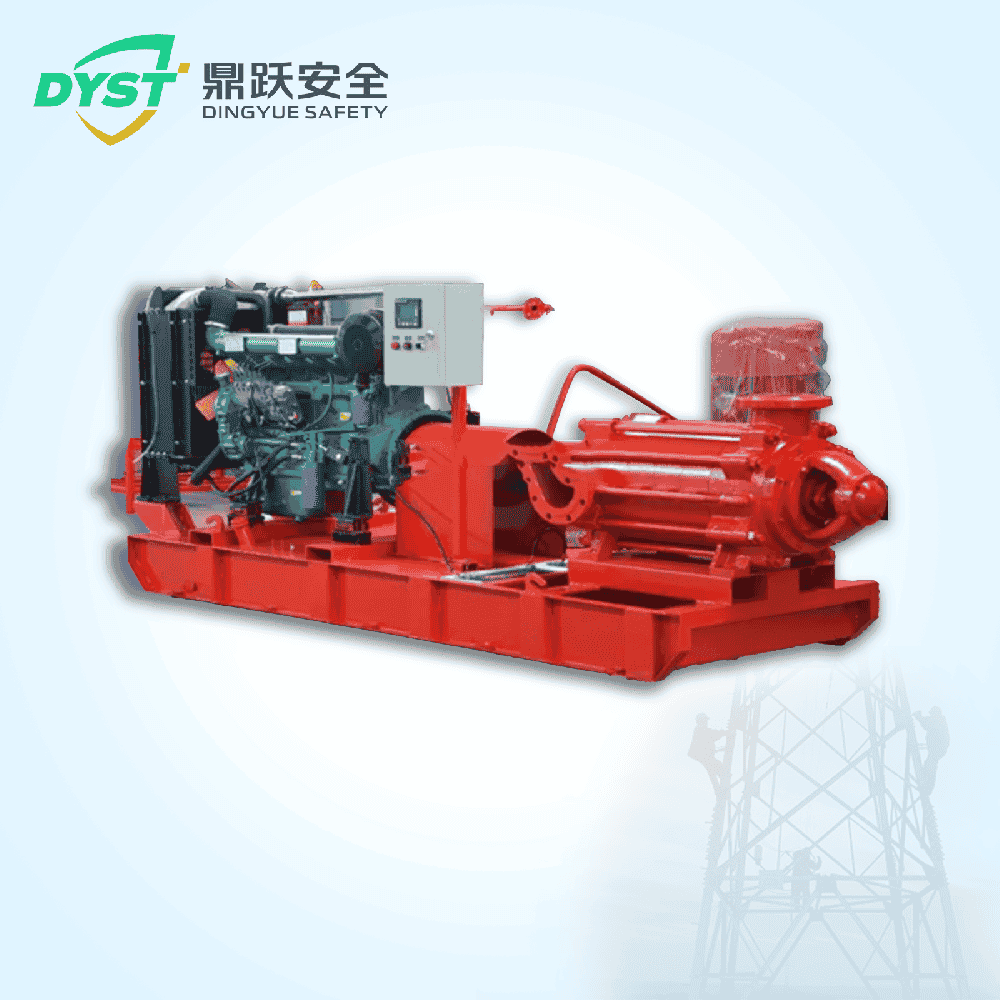
便携式灭火水泵的应用案例解析和分析
便携式灭火水泵在提高灭火救援效率、降低人员伤亡风险和优化现场作业流程方面具有显著意义。未来,随着相关技术的不断改进和新材料的应用,便携式灭火设备将在消防救援体系中发挥更加关键的作用,成为保障公共安全的重要装备。
2025-04-12

精准检测,科学决策,有毒有害气体检测仪在实际案例的解析
有毒有害气体检测仪的应用显著提升了化工事故和火灾等突发事件的应急响应能力和决策效率,为构建智能化、信息化的应急管理体系提供了新思路。通过高灵敏度传感器和实时数据传输,检测仪能够精确监测现场气体浓度,快速发出预警,为救援人员提供科学依据。
2025-04-10

红外热成像仪,森林防火与应急救援的“火眼金睛”
红外热成像仪在早期火灾预警、复杂环境下的人员定位等方面均展现出显著优势。其高灵敏度、全天候工作的特性为应急响应提供了关键技术支持,有效降低了灾害损失。随着技术的不断进步和多平台协同应用的深入推广,红外热成像仪将在未来的公共安全和应急管理体系···
2025-04-09

小型火情侦查系统在城市消防与森林防火中的成功应用案例解析
小型火情侦查系统在火灾预警和应急响应中的作用日益凸显。该系统通常依托于高精度传感器、红外热成像和无人机巡检等手段,实现对火情的实时监测和早期预警,为城市消防和森林防火提供了技术支撑。通过精确定位与快速响应,该系统在火灾初期就能锁定火源,有效···
2025-04-07

漂浮的希望,救生圈的救援力量
救生圈是一种优秀的安全救援设备。其浮力≥150N,设计合理,浮力良好,能支撑落水者漂浮,减少溺水风险并减缓体力消耗,增加自救机会。它易于投掷、抓取,方便救援人员快速实施救援。
2024-10-09

深海护航,潜水减压舱的生命守护
潜水减压舱采用多舱结构,可同时容纳多名潜水员,各舱室能独立调节压力与氧气浓度,满足不同减压需求,适用于复杂救援与作业环境及不同潜水任务。
2024-10-04

高效水下切割机,水下救援必备设备
水下切割机高效作业,具备强大切割能力,能在短时间内对被障碍物包围或困住的船只、车辆等目标进行切割和破拆,大大缩短救援时间。
2024-10-03

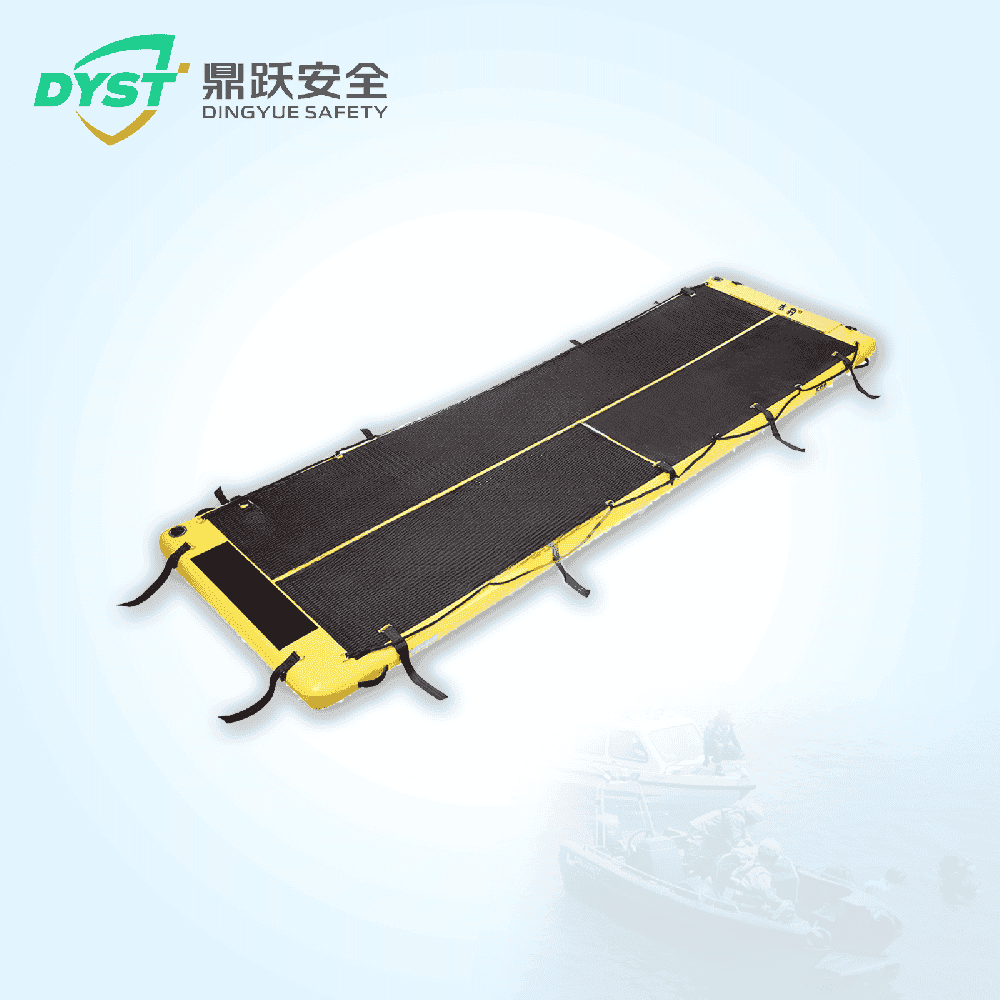
救援浮桥,快速搭建,连接希望与安全
救援浮桥采用先进的模块化设计,救援浮桥的长度不小于5米,能承载的浮力不小于200公斤,充气气压不小于15 psi,能够在短时间内完成充气。
2024-09-26

最小承载200KG浮力,5米长度,以浮桥搭建生命通道
救援浮桥是一种专门用于紧急救援的临时水上通道设备。它由轻质浮体、连接件和桥面组成,可以快速搭建在河流、湖泊等水域,为救援人员提供稳定、安全的通道,帮助被困人员快速脱离危险,特别适用于水面、沼泽、湿地以及冰面。
2024-09-25

潜水打捞系统实际案例:东海“长兴油轮”沉没打捞案例
东海“长兴油轮”打捞案例展示了潜水打捞系统在复杂水下环境中的高效性与多功能性。通过精准的定位、浮力支持和油料处理,该系统成功应对了多项技术挑战,为现代打捞作业树立了典范。
2024-09-24

保障生命安全,防汛应急包为您守护家园
随着气候变化加剧,极端天气频发,暴雨、洪涝灾害成为许多地区面临的现实威胁。防汛应急包正是为此而设计的多功能应急装备,能够在洪灾和台风来袭时为您和家人提供紧急保护。
2024-11-05
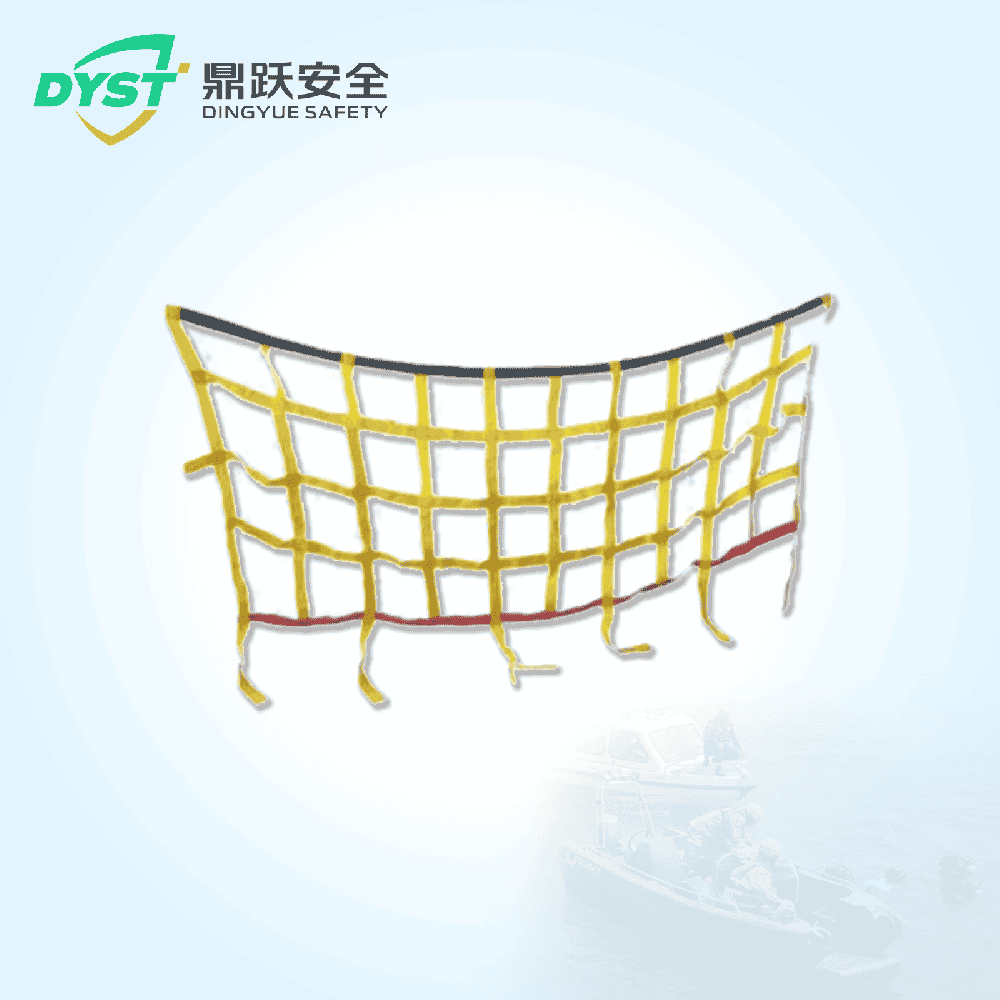
水上救生滚钩,紧急救援中的隐形英雄
救援人员借助滚钩,远距离精准锁定并挂住桥梁的残骸,迅速架设救援绳索,并通过滚钩的固定力将绳索稳固在合适的位置上,成功在几分钟内架设了通道,安全转移被困人员。这种快速而精准的救援手段为避免更大伤亡赢得了宝贵的时间。
2024-10-27

浮艇泵,提升排水效率_鼎跃安全
浮艇泵是一种专为水面作业设计的排水设备,由泵体和浮筒组合而成,具备良好的浮力和稳定性。它可以在水面上自由漂浮,适用于各种水域,如湖泊、河流和洪灾现场。
2024-10-22
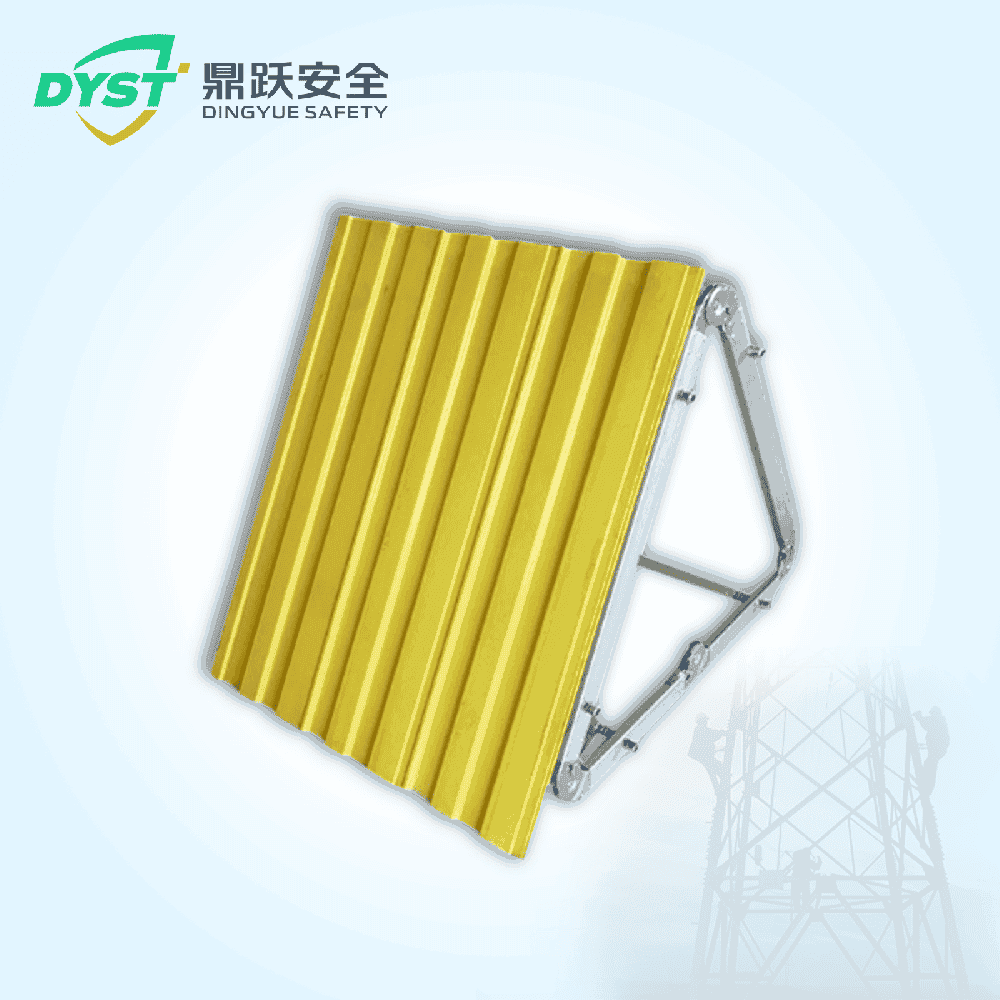
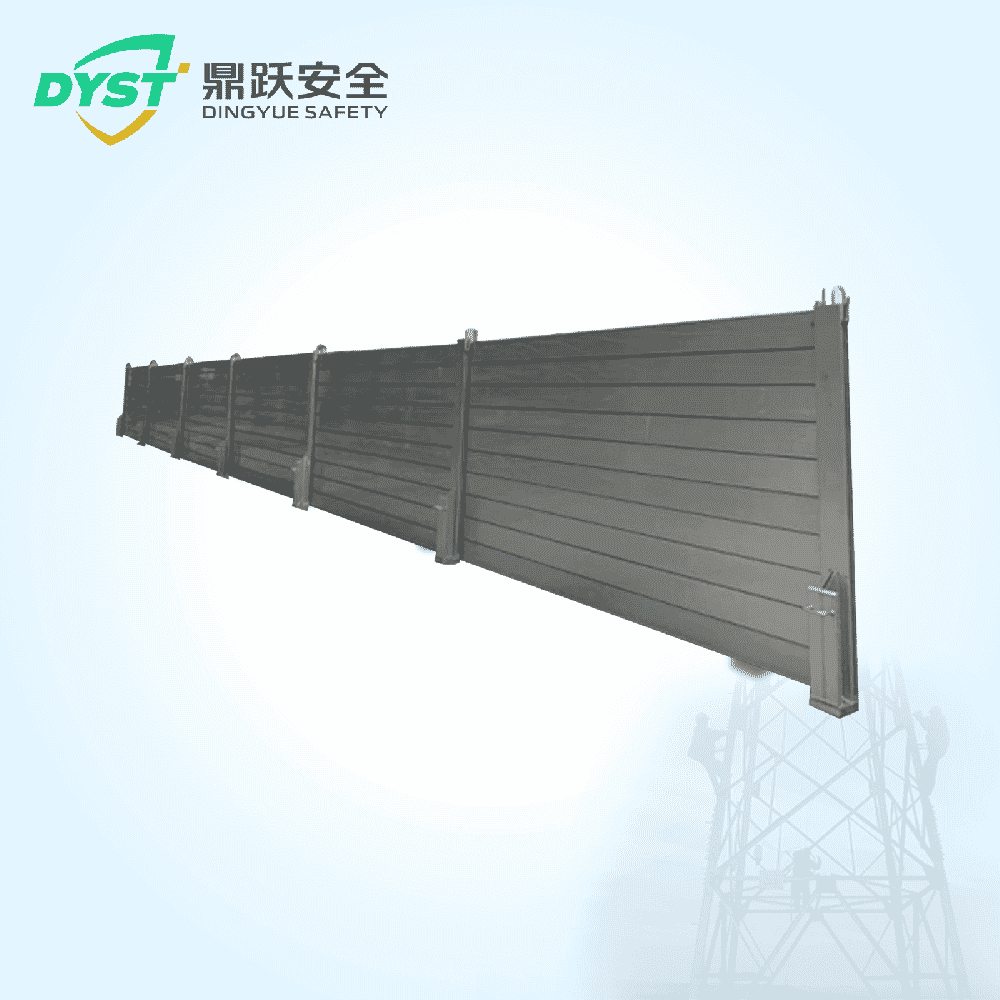
模块化防洪屏障,抗击洪水的快速响应工具
组合式防洪板由多个模块化板材构成,可快速拼接为防洪墙,坚固结构能抵御洪水冲击,防止水流侵入建筑与关键基础设施。其模块化设计可依需求调整高宽,适应多样地形与水位,能安装在城市河道、地下车库入口等场所,洪灾后易拆卸存储。
2024-10-20

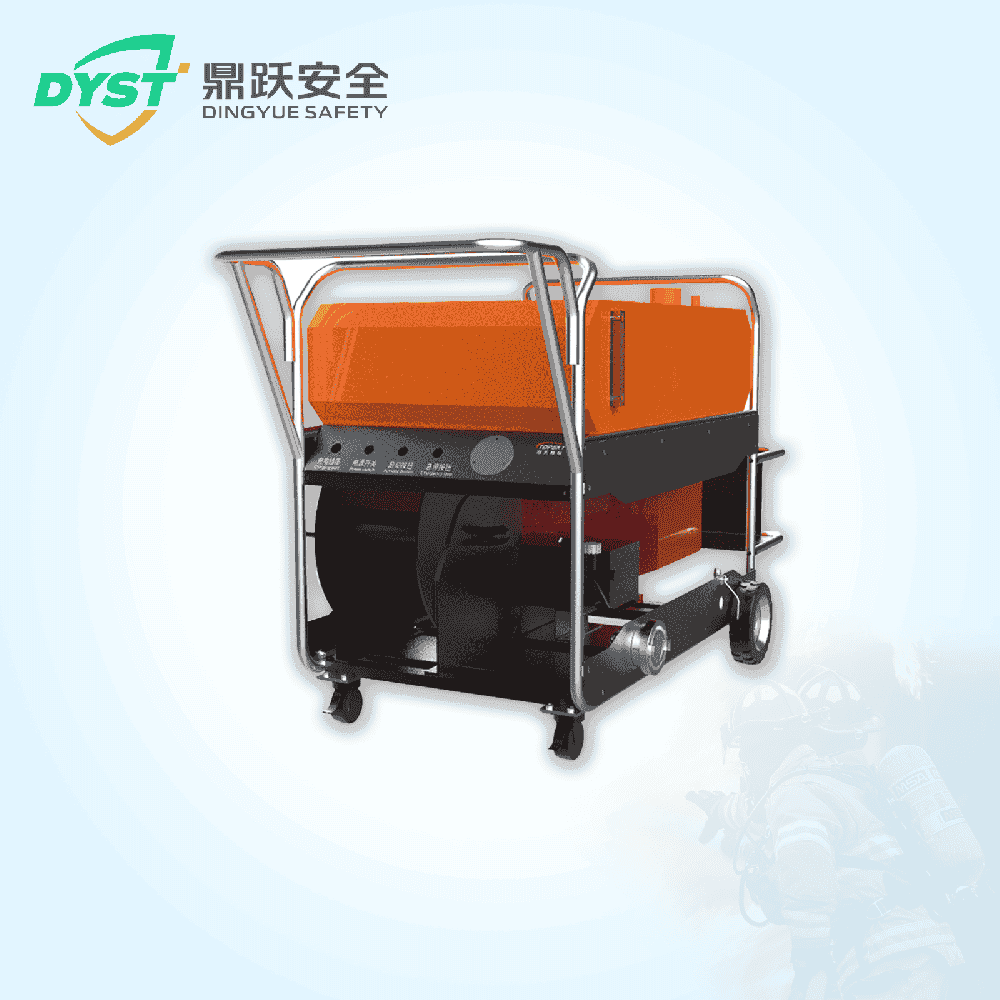
应急救援中的全能助手,移动式排水发电照明泵站
移动式泵站主要配备高效泵站,集排水、发电与照明功能于一体。它能在洪涝、内涝区域迅速排水,适用于城市街道、地下通道、隧道和农田等。在断电时可自带发电功能,为救援设备、医疗设施和通讯系统等提供紧急电力,无论城市还是偏远地区都能维持供电。
2024-10-19

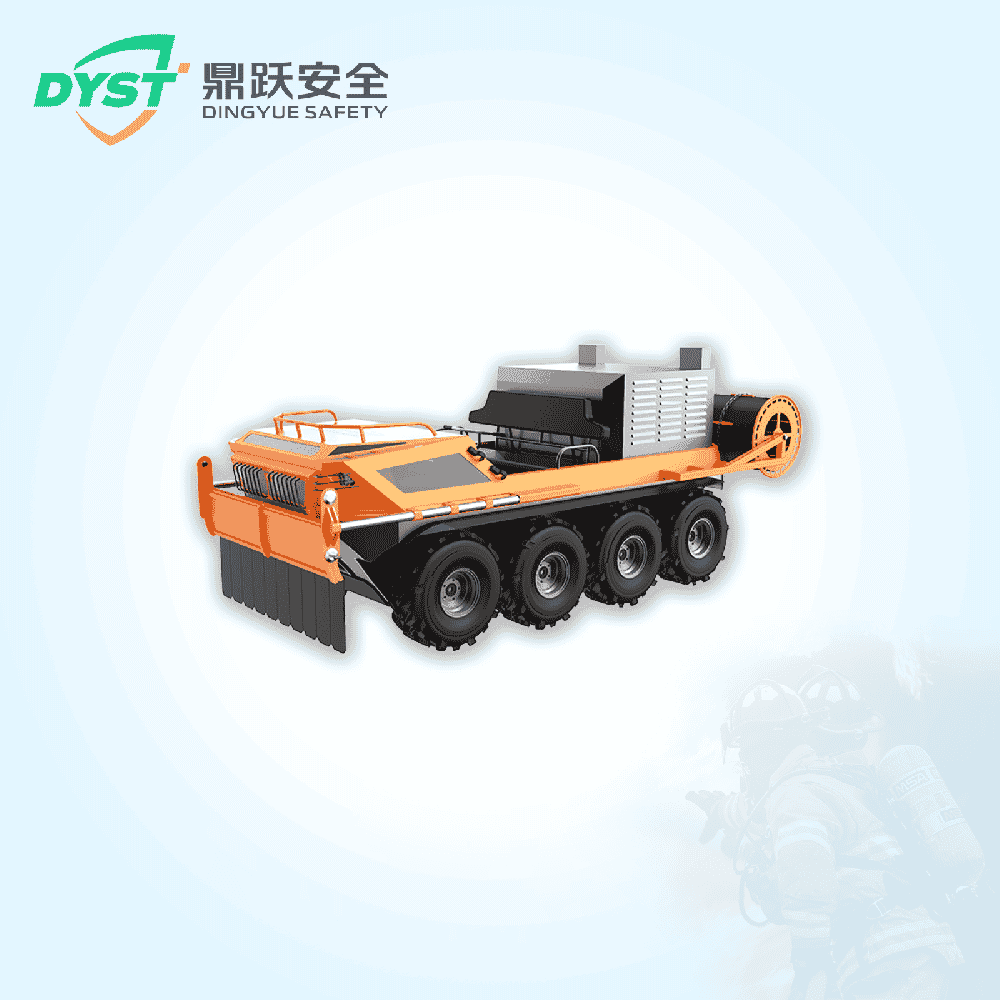
快速排水利器,垂直供排水抢险车
垂直供排水抢险车是一种专门用于灾害救援和应急抢险的多功能车辆,主要用于快速应对洪水、内涝、地下空间积水等水灾情况。它具备强大的供水和排水能力,能够在灾害发生时迅速展开工作。
2024-10-18

多功能便携应急灯,强光、防水、防爆一体化设计
便携式防水防爆应急强光灯凭借其高亮度、耐用性、防水性与防爆性,在众多应急事故救援场景中扮演了不可或缺的角色。
2024-12-18

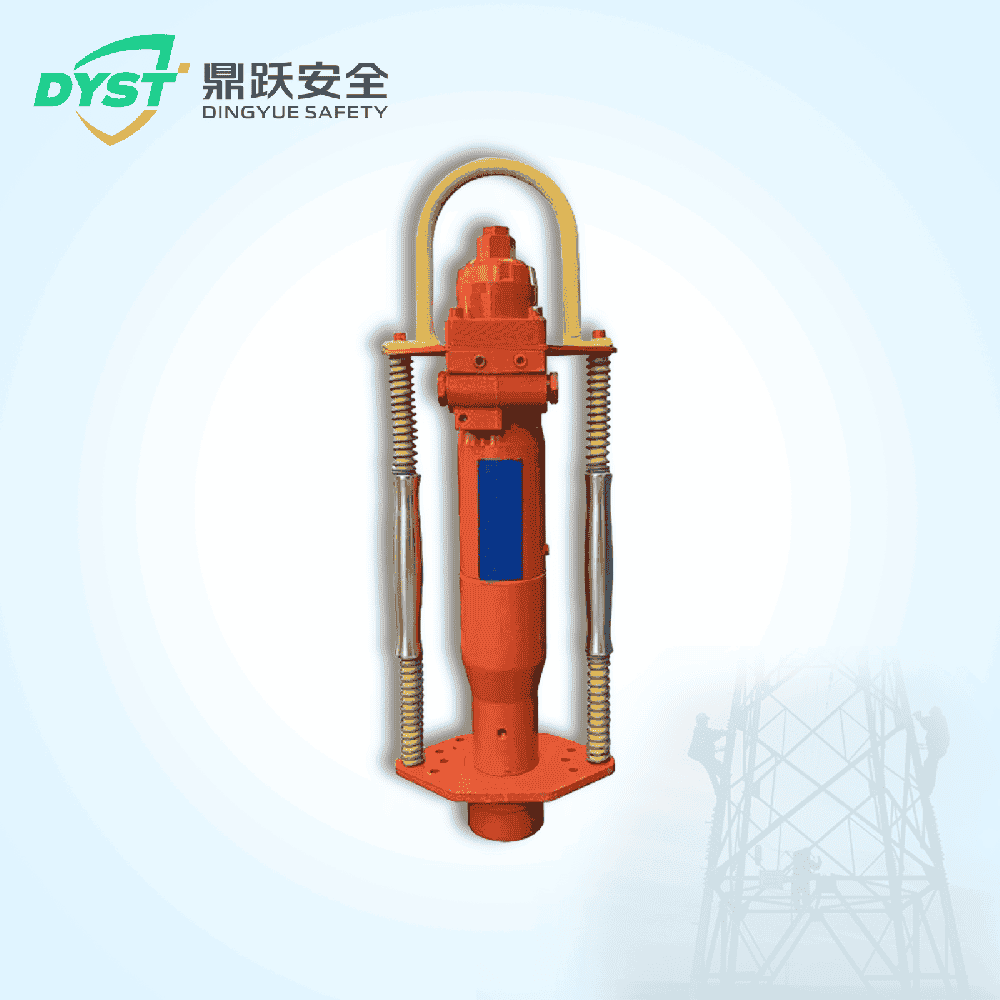
救援顶杆,应急救援中的支撑与生命保障工具
救援顶杆以高强度合金材料打造,具备轻便、耐用和操作便捷的特点;能够在复杂环境中稳稳地支持重物,有效预防结构坍塌。其具备液压或机械伸缩功能,操作简易且重量较轻,便于救援队员快速布设。它不仅能用于结构支撑,还可施压、撑开障碍、稳固建筑等,是救援···
2024-12-15

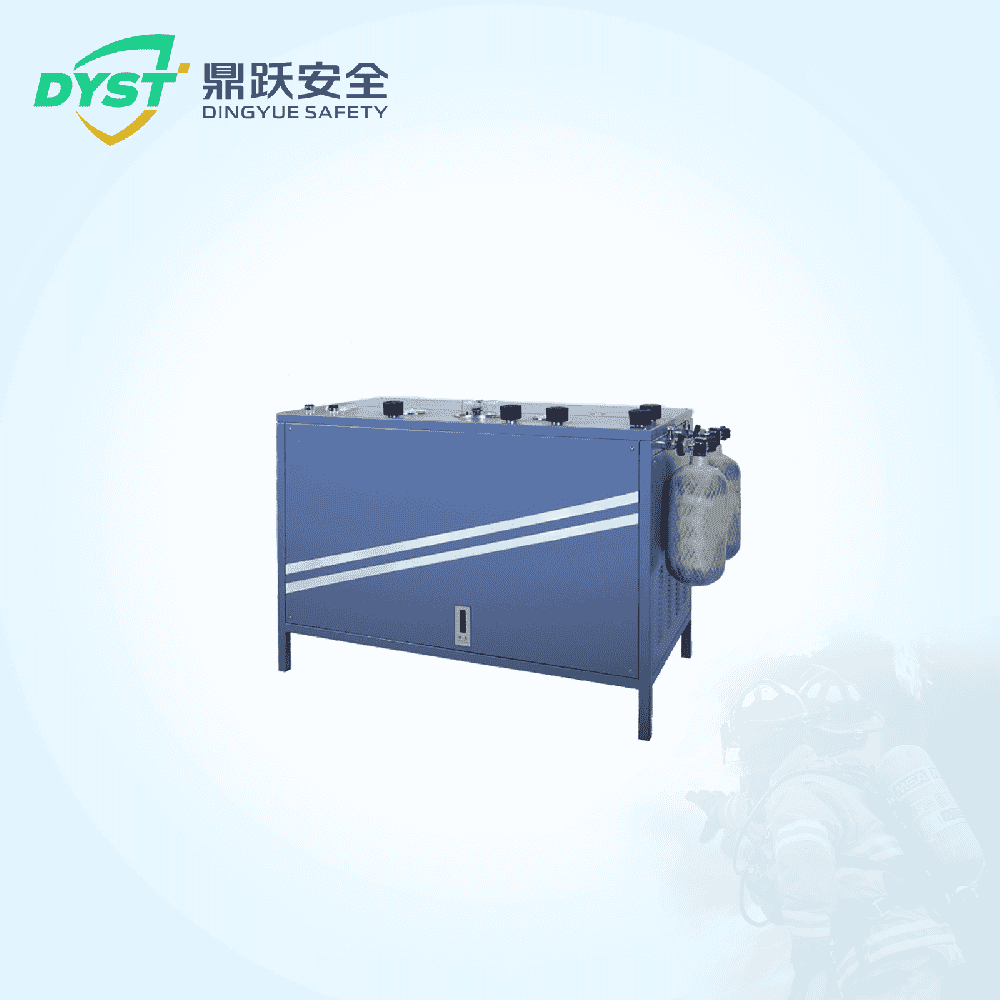
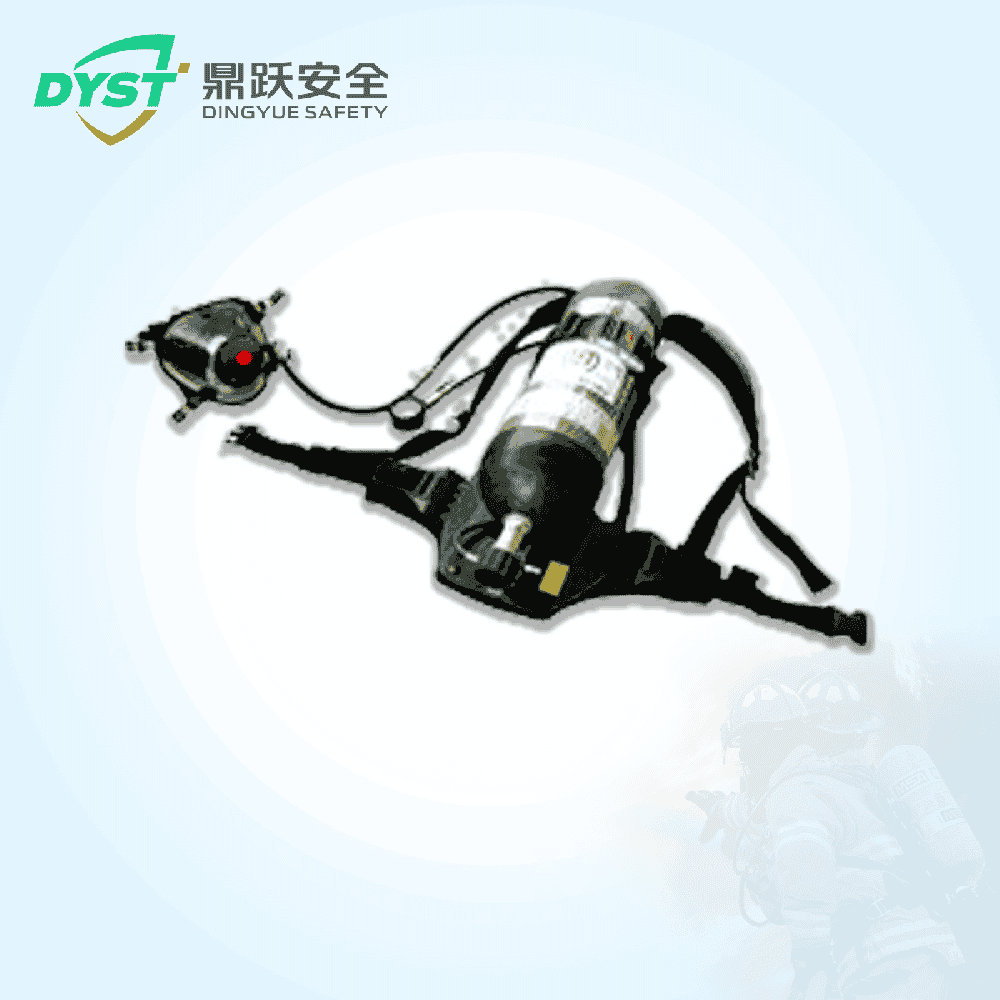
氧气呼吸器:生命危急时刻的“呼吸守护者”
氧气呼吸器可借内置氧气瓶或化学制氧装置,为使用者于无氧或有毒环境中供给独立氧气源,保障正常呼吸。其呼吸器以轻质材料打造,配有过滤装置,能隔绝空气中有毒物质,形成双重防护。
2024-12-12

无人机,高空之眼,救援利器
无人机以其快速部署、灵活操作和全景视野的优势,成为抢险救灾中不可或缺的重要装备。无论是灾害评估、人员搜救,还是物资运输,无人机都能显著提升救援效率,减少救援人员的风险。
2024-12-06

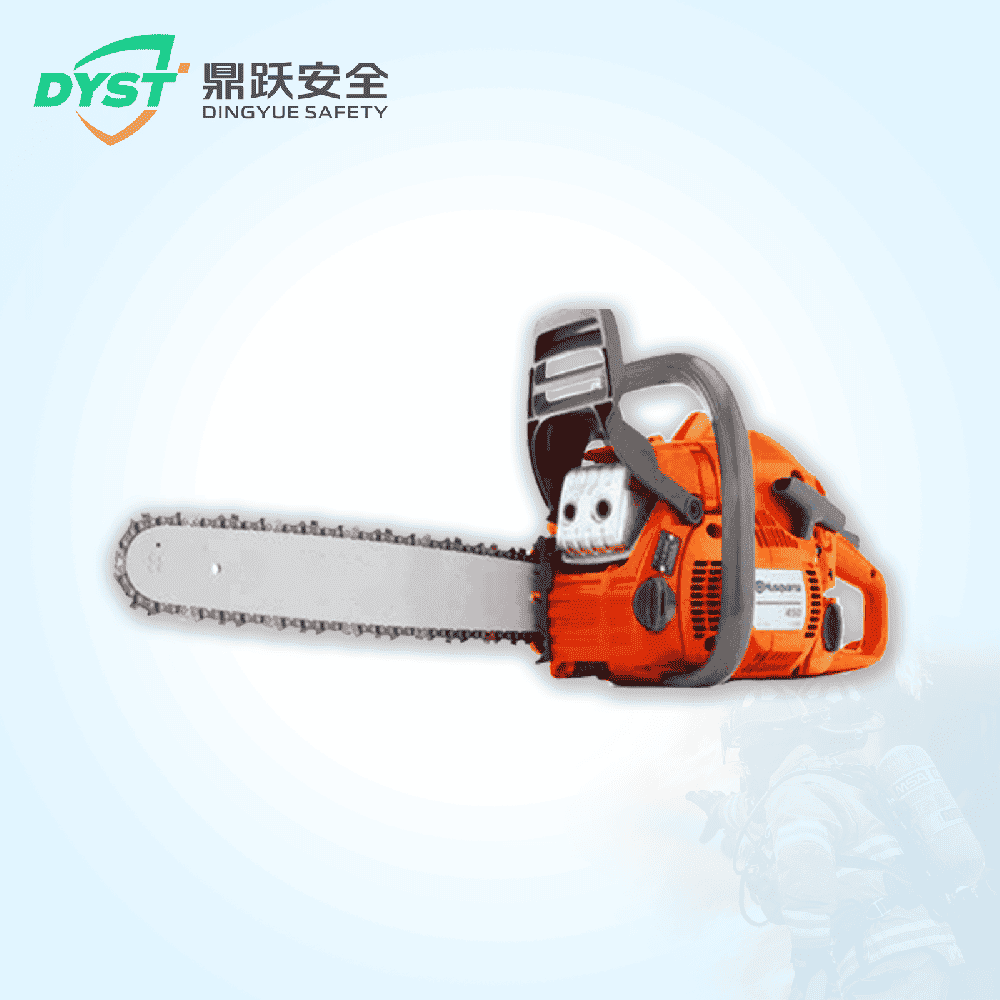
链锯,在事故救援中,切割生命通道
链锯不仅是一种工具,更是救援现场的生命通道。在每一次紧急任务中,它都以高效、可靠的表现,为被困者赢得宝贵的生存机会。让它在更多灾难面前,成为挽救生命的利器。
2024-12-05

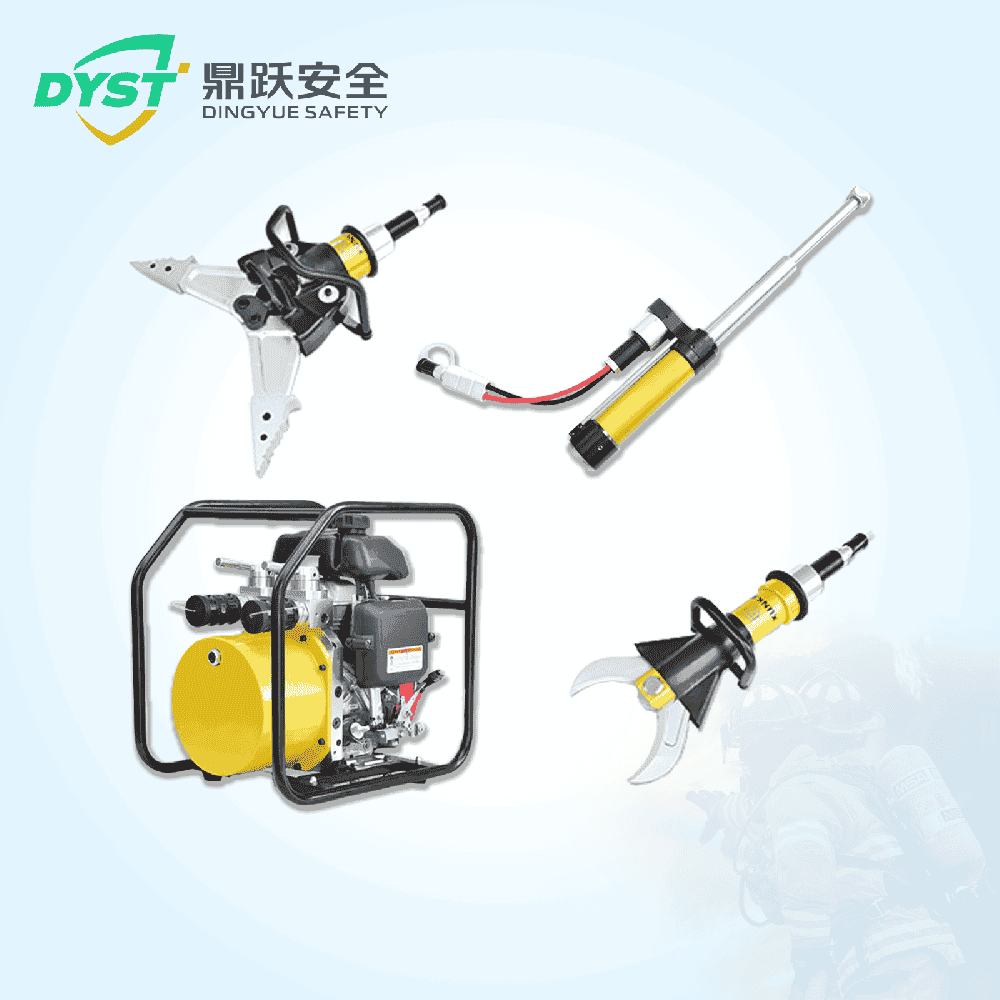
液压剪切器,事故救援中的“生命之刃”
在灾难现场,时间就是生命,快速、精准的救援工具是成功营救的关键。液压剪切器,作为现代事故救援中不可或缺的工具,凭借其强大的切割能力和高效性能,在紧急时刻帮助我们突破重重障碍,成功挽救了无数生命。
2024-12-04

卫星电话,偏远地区与灾难救援的通信生命线
卫星电话是一种基于卫星网络的无线通信设备,利用地球同步轨道或低轨卫星进行语音和数据传输。它通过与地球轨道上的通信卫星直接连接,实现全球范围内的通信,无需依赖地面网络设施,能够保障通信畅通,为救援行动提供了可靠的支持和生命保障。
2025-01-01

灵活适应,高通量卫星便携站满足多元通信需求
高通量卫星便携站应用于救援行动,能够提高紧急行动的响应速度;此装备的使用培训和操作将提升救援团队的通信能力,使救援行动更加高效、精准,从而拯救更多生命。
2024-12-29

窄带自组网基站系统,灵活应对灾害,构建通信生态
窄带自组网基站系统能快速搭建通信网络,确保救援指令即时传达,大幅缩短决策与执行耗时,有力提升救援效率;凭借自主性与灵活性,弥补传统通信短板,增强灾害应对实力,提升救援可靠性。
2024-12-28

北斗赋能,腕表变身精准救援利器
北斗腕表融合了北斗卫星导航定位、信息传递、紧急报警等多项功能,是一款集多种高科技于一体的智能设备。其核心特点包括精准定位、双向信息发送功能、超长待机时间、全天候操作能力,以及抗冲击、防水、防尘的坚固设计。通过宣传北斗腕表的实用性和可靠性,可···
2024-12-27

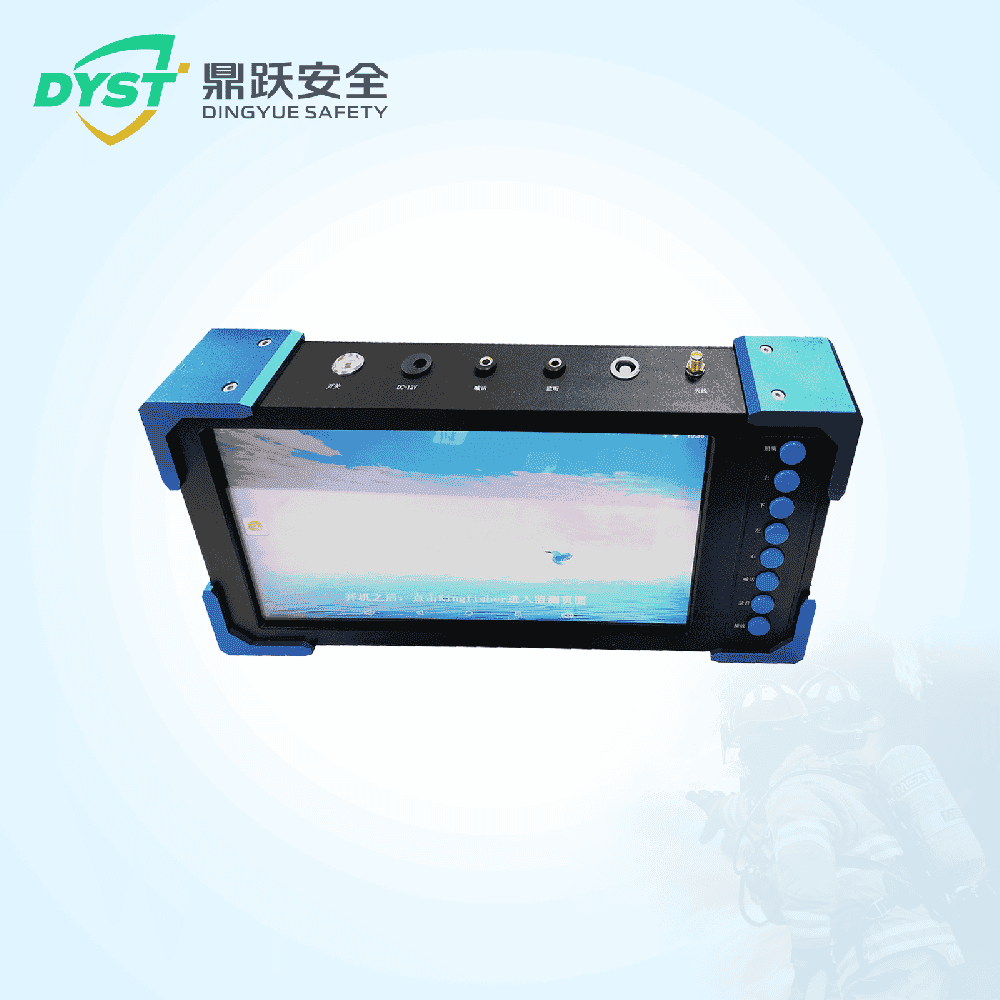
单兵图传在应急救援中的应用
单兵图传是一种便携式无线视频传输设备,由前端采集设备和无线传输装置组成,能够实时将救援现场的视频、音频信息传输到指挥中心或其他终端设备。该系统支持远程监控、双向语音通讯,甚至与其他救援设备联动,为应急指挥和协调提供强大的技术支持。
2024-12-20

超轻卫星便携站解决通信,轻便与高效的结合
超轻卫星便携站DY-TXE-UPS在台风“摩羯”带来的灾害应对中,凭借其快速部署、稳定通信的特点,极大提升了救援工作的效率与效果。它为灾区的应急指挥和救援行动提供了至关重要的通信保障。
2024-09-09

从防汛到防护,彩条布的全方位作用
近年来,各类突发事件和自然灾害频发,特别是在防汛抗洪、灾后抢险、应急救援等场景中,对现场临时防护和物资快速部署提出了更高要求。彩条布作为一种具有优良防水、防风、耐候性能的应急物资,凭借其鲜明的色彩和简便易用的特点,被广泛应用于灾情现场的应急···
2025-02-09

全方位升降灯:应急救援中的“光明守护者”
全方位升降灯作为一种高效、灵活的照明设备,凭借其高亮度、可升降、全方位覆盖的特点。升降灯还具备防水、防尘、抗冲击等特性,以应对极端环境,确保救援工作高效、安全进行,能够为救援行动提供强有力的支持。
2025-02-04

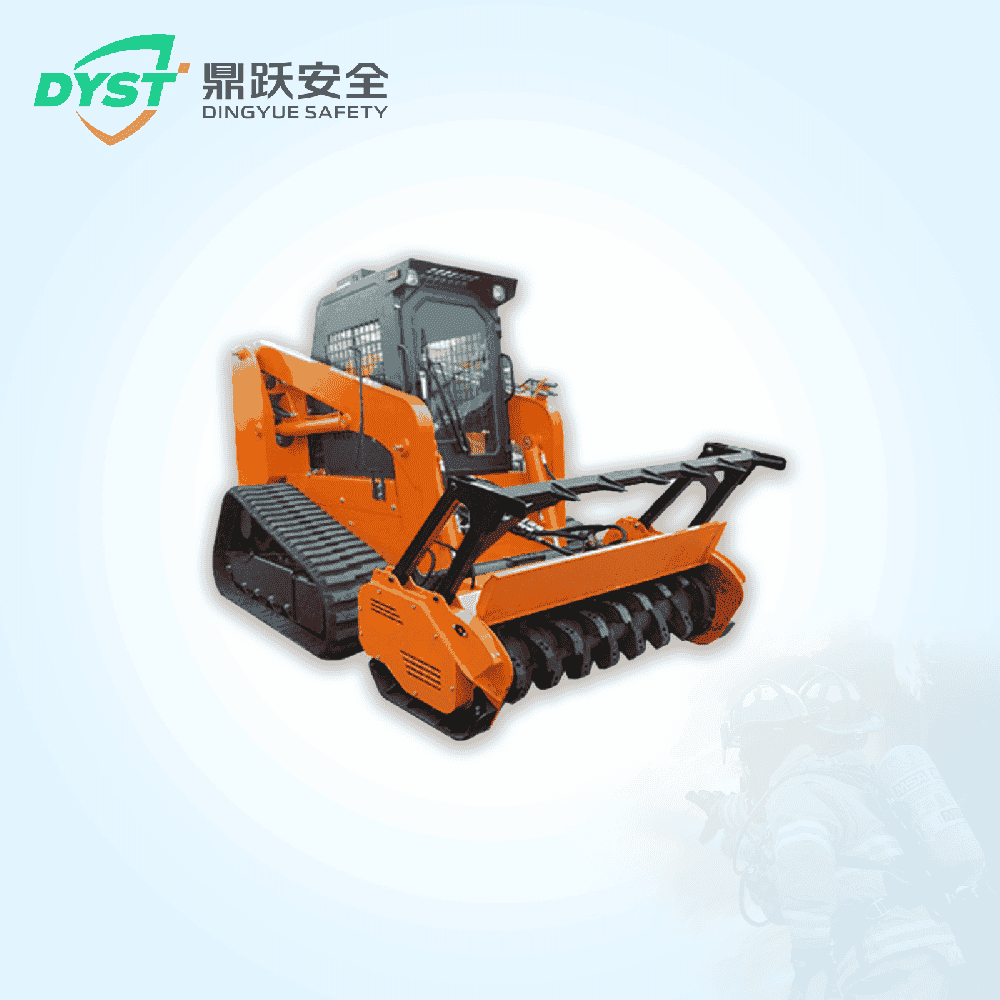
雪海 “利剑”:破冰除雪车的高效之路
破冰除雪车是一种专门用于清除道路积雪和破除路面冰层的工程机械,广泛应用于城市道路、高速公路、机场跑道及其他重要交通要道的冬季维护。其采用高性能的动力系统,有强大的动力输出,可以应对不同厚度的冰雪清除作用。
2025-01-08
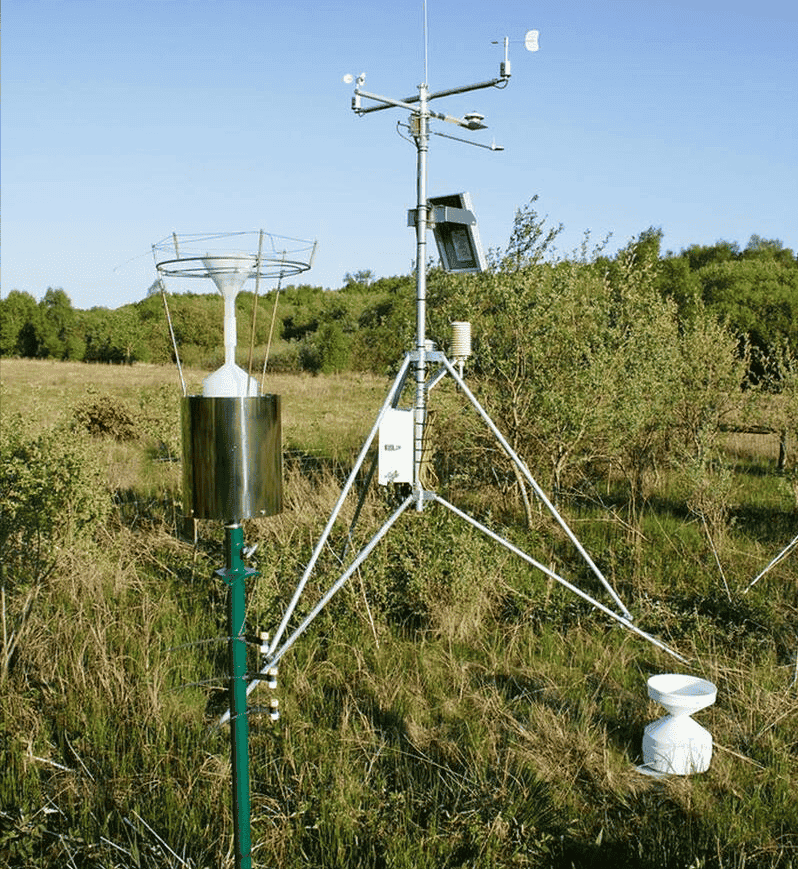
便携式气象仪的应用方案
便携式气象仪是一种轻便、多功能的环境监测设备,能够实时监测并记录气象参数,如温度、湿度、风速、风向、大气压力、降雨量等。
2025-01-05

汽柴油发电机丨电力恢复,心亦安稳
汽柴油发电机利用内燃机原理,通过燃烧汽油或柴油产生动力,驱动发电机产生电力。
2024-09-13

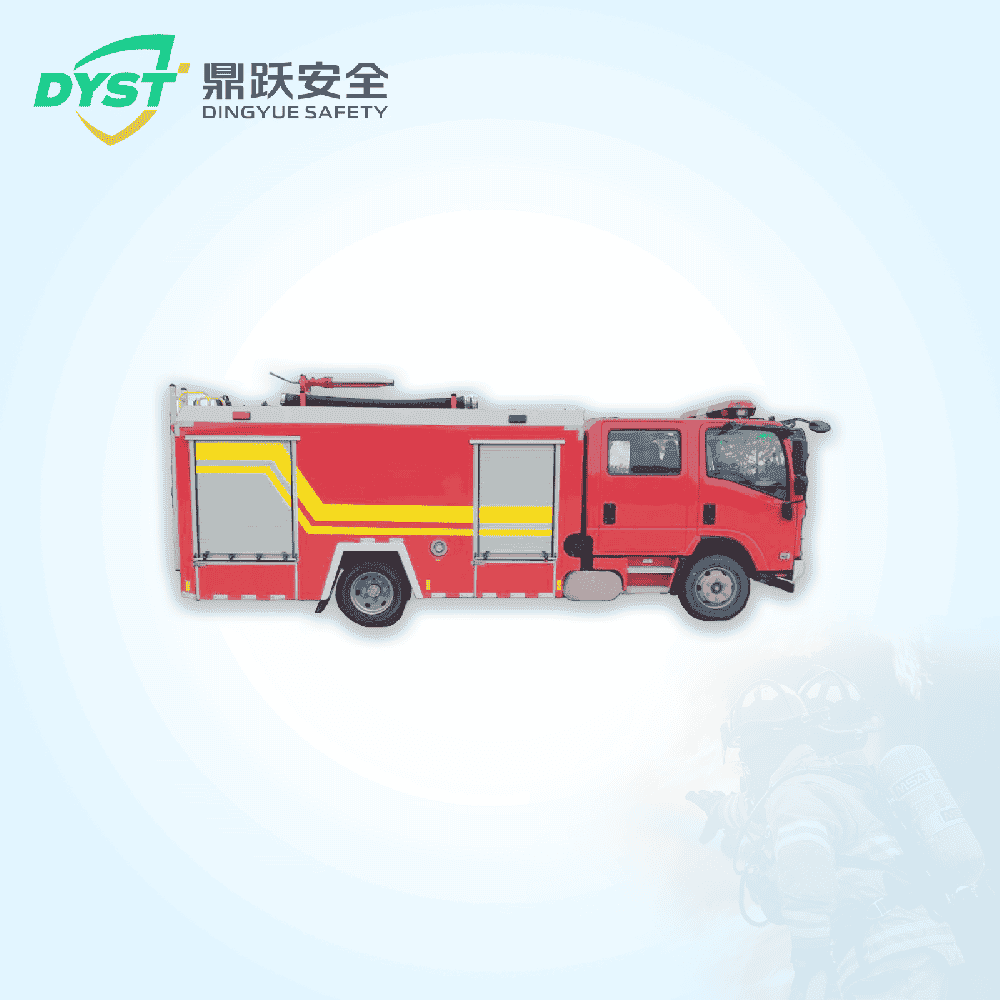
停电克星:应急电源车应用案例
应急电源车作为一种高效的移动发电解决方案,它能够在电力故障发生时,迅速部署至指定地点,为关键基础设施如医院、通讯设施和紧急指挥中心等提供稳定、可靠的电力支持,对减轻灾害影响、保障公共安全及加速灾后恢复具有至关重要的作用。
2024-09-09

救生抛投器,小巧轻便,救生能力却不容小觑
救生抛投器,作为一种高效、安全、远程投送救援装置,通过气压、弹射或电动方式将浮具或救生绳索快速精准地投送至落水者或指定水域,大大提升了水上救援效率和安全系数。
2025-06-02

水域救援套装,水上救援的“全能铠甲”
水域救援套装在于为救援人员提供了可靠的安全保障,降低了救援风险。它能够提升救援效率,使救援人员能够更快地到达被困人员身边,实施有效的救援措施。
2025-06-01

潜水减压舱,水域救援的 “生命保障舱”
潜水减压舱模拟潜水员上升,帮助其排出溶解惰性气体。潜水员深潜时,惰性气体会在高压下溶解于血液和组织中,快速上升会导致气压骤降,气体迅速释放形成气泡,引发减压病。
2025-05-31
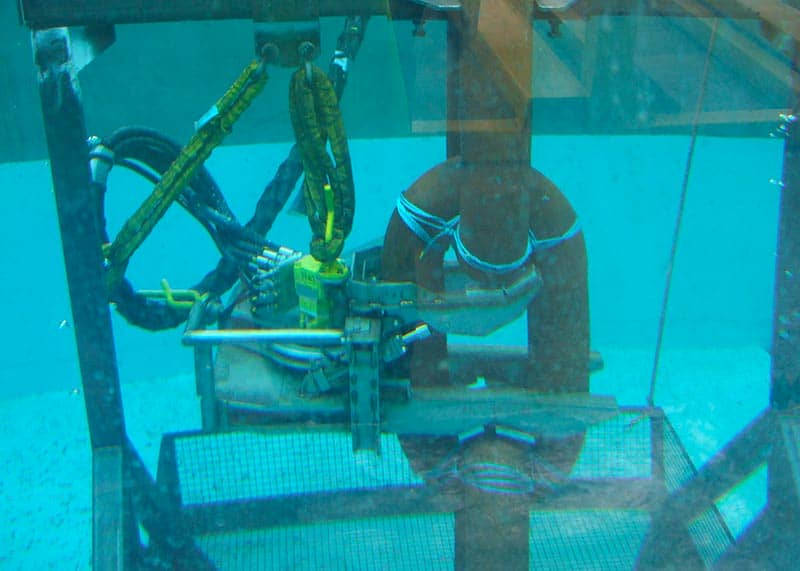
水下切割机,精准切割的深海利器
在海洋资源开发和水域安全维护中,水下切割作业是不可或缺的一环。水下切割机作为一种先进的工具,为水下施工作业提供了强大的技术支持,使其能够在复杂的水下环境中高效、安全地完成各种切割任务。
2025-05-30
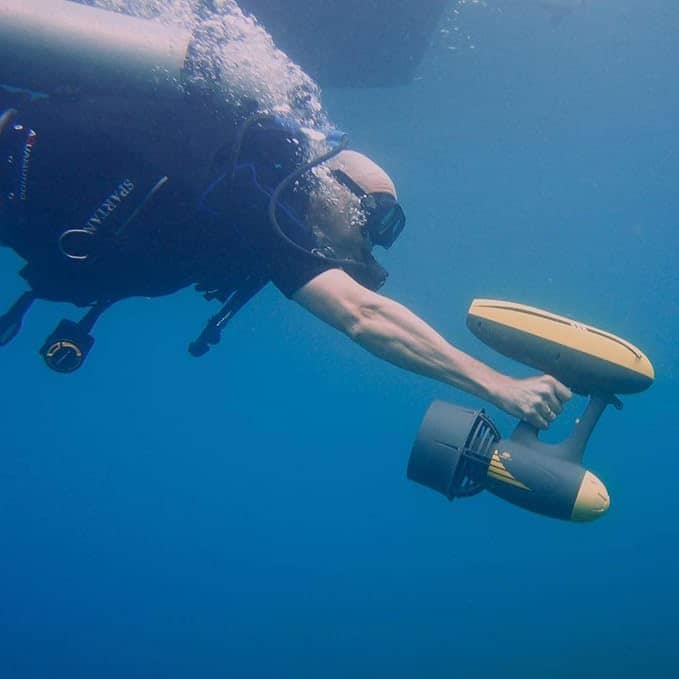
水下推进器,畅游水下的“动力引擎”
水域救援与水下作业的高效性直接关系生命安全和资源开发效率。传统救援工具依赖人工操作,面临响应速度慢、体力消耗大、环境适应性差等局限。其15秒极速响应能力与6.5kg推力,可快速穿透复杂水域,降低救援人员体力消耗,将溺水者存活率提升30%以上···
2025-05-28
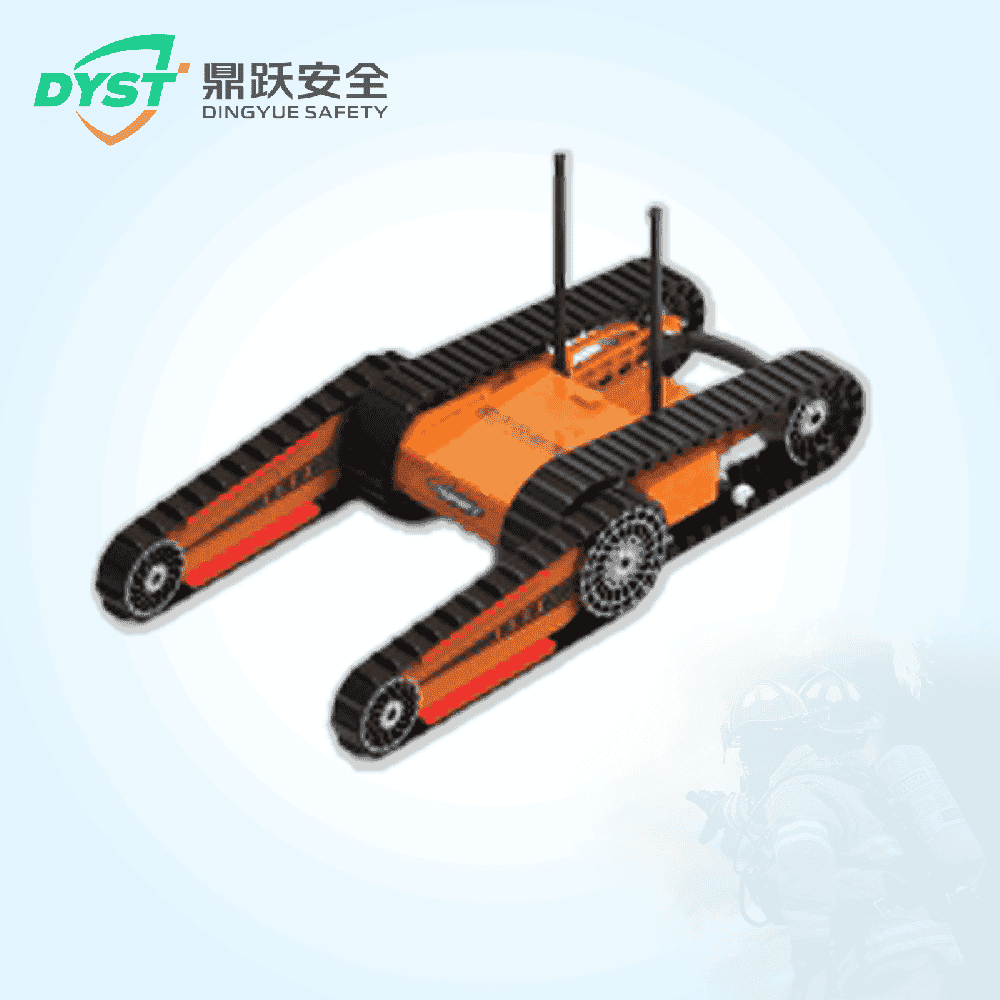
水下机器人,探索水域安全的智能卫士
城市水域增多,安全隐患增加,对水域安全保障和救援能力提出了更高要求。公众对生命安全保障的期望不断提升,促使救援装备向智能化、高效化方向发展。水下机器人能够在复杂水域环境中迅速获取信息、执行救援任务,满足了水域救援对快速响应和精准救援的需求。
2025-05-26
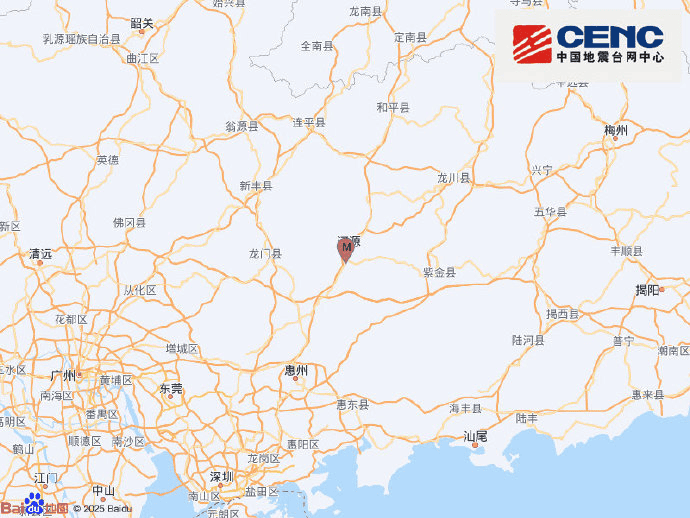
广东河源市源城区发生3.5级地震,暂无人员伤亡报告
2025年5月29日13时17分,在广东省河源市源城区(北纬23.71度,东经114.69度)发生3.5级地震,震源深度11千米。
2025-05-29

山东高密一化工企业发生爆炸事故 正全力组织救援救治
2025年5月27日11时57分左右,山东省高密市友道化学有限公司一车间突发爆炸事故,现场浓烟滚滚,火势一度猛烈。
2025-05-27

贵州大方县突发两起山体滑坡 致多人被困 救援紧急进行中
5月22日凌晨,贵州省毕节市大方县长石镇和果瓦乡接连发生山体滑坡,造成多人被困。记者从大方县相关部门获悉,长石镇有2人被困,果瓦乡有多人被困,具体人数尚在核实中,目前救援工作正在紧张进行。
2025-05-22

云南曲靖陆良县发生装载机冲撞事件 已致6死4伤
2024年5月18日上午,云南省曲靖市陆良县马街镇大龙潭村发生一起严重交通事故。一辆装载机在下坡路段行驶过程中疑似刹车失灵,冲入当地一处集市,撞向正在买菜、卖菜的群众,造成严重人员伤亡。
2025-05-21
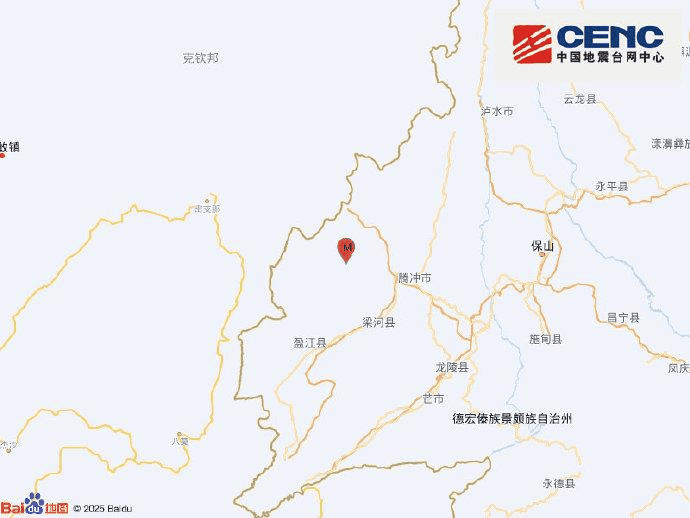
云南德宏州盈江县发生4.5级地震 震源深度10公里
中国地震台网正式测定:2025年5月16日09时00分,在云南省德宏傣族景颇族自治州盈江县(北纬25.12度,东经98.13度)发生4.5级地震,震源深度10公里。
2025-05-16
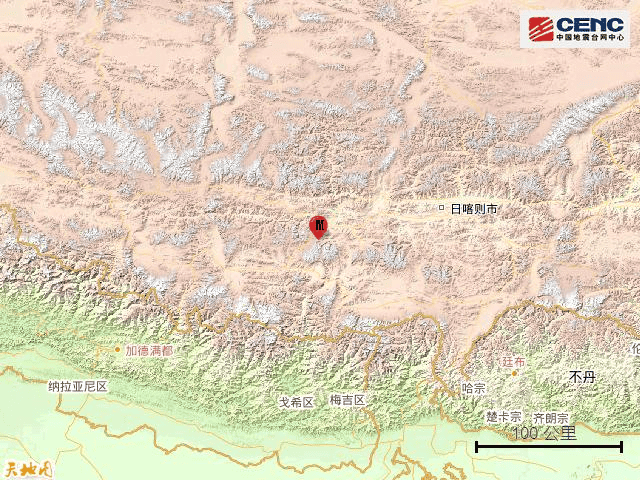
西藏拉孜发生5.5级地震 震感明显
5月12日05时11分,中国地震台网测定本次地震震级为5.5级,震源深度10千米,震中位于北纬28.91度、东经87.54度。
2025-05-12


数字化转型已被列入中国“十四五”规划和2035远景目标,新一轮的科技革命和产业变革深入发展,数字化、智能化已成为产业高质量发展的新引擎。作为重要的基础设施之一,变电站这类的电力设施的稳定运行是社会、经济发展的重中之重。电力变电站巡检重复性强、强度高,而且地形复杂,国内变电站大多采用传统的人工巡视方式,受巡视人员业务水平、工作经验等诸多因素的制约,漏检、误检、缺陷漏发现情况时有发生,导致电路事故。人工巡检方式难以完全满足现代化变电站安全运行的要求,而传统电力巡检机器人多为轮式,无法在跨楼层、台阶、草地、泥地等不规则地面连续作业。
智能四足机器人,作为集行走、跑步、跳跃和倒地爬起等运动能力于一身的智能化设备,在不改变原有环境的的前提下,实地验证了对变电站室外鹅卵石、草地、陡坡等非结构化地形的高适应性,还通过了交界处的各种台阶、楼梯等障碍物,实现巡检机器人在变电站中的全场景覆盖。
全场景覆盖将为电力系统带来更高效的电力巡检:
1、大幅扩大机器人巡检区域:四足机器人可覆盖2万5千平米变电站 ;
2、打通室外、室内巡检场景:以往变电站室外与室内环境需要不同的机器人,四足机器人能胜任室内外不同地形,并跨越边界障碍,降低巡 检成本,提高管理效率 ;
3、提升巡检效率与数据度:相比传统的轮式机器人,四足机器人能够跨越障碍物 ,缩短巡检路程 ,选取更合适的观测位置 。全向自主导航 ,智能识别,智慧巡检;四足机器人基于激光雷达的SLAM(实时定位与地图构建),实现了变电站免模型的点云建图,在2万5千平米的变电站中仅花费约20分钟采集三维点云数据,能根据任务模型实现全向导航路径自主规划,并实时上报坐标信息。四足机器人AI算力实现就地目标检测小闭环,可容忍环境扰动因素造成的偏差,基于深度学习的算法模型实现目标状态识别、温度检测。
| 序号 | 类别 | 名称 | 技术参数 |
| 1 | 本体规模 | 趴地尺寸(长×宽×高) | 1070mm×470mm×346mm |
| 站立尺寸(长×宽×高) | 950mm×470mm×700mm | ||
| 整机重量 | 53kg | ||
| 2 | 电气参数 | 电池容量 | 19.5Ah(25C环境下测得的理想数据) |
| 电池额定电压 | 72V | ||
| 空载续航时间 | 4h | ||
| 有效负载续航时间 | 2h | ||
| 充电器输入 | 200V~240V | ||
| 充电器输出 | 84V/8A | ||
| 充电时长 | 25h-3h | ||
| 外接电源接口 | 5V;12V;24V;72V(BAT) | ||
| 外接通讯接口 | Ethernet;WiFi;USB;RS485/RS232 | ||
| 自主充电功能(选配) | 支持 | ||
| 3 | 运动参数 | 最高速度 | 4.95m/s(极限测试数据) |
| 最大行走速度 | 1.7m/s | ||
| 可攀爬坡最大坡度 | ±30° | ||
| 可攀爬台阶最大高度 | 18cm | ||
| 有效负载 | 20kg | ||
| 最大负载 | 85kg(极限测试数据) |